 库卡机器人编程之BAS程序
库卡机器人编程之BAS程序
更多内容请点击上方安德鲁机器人关注。 转载请先后台留言,请支持原创!谢谢
在库卡机器人程序目录下R1System下有一个程序名为BAS.SRC,该程序主要用来设置机器人运动相关参数数,比如坐标系、速度、加速度等等。
一.联机表单
下面我们看看常用的联机表单如何使用BAS程序:
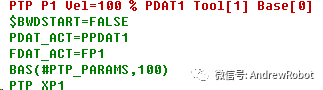
1.PTP运动:
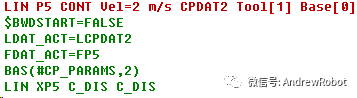
2.LIN直线运动:
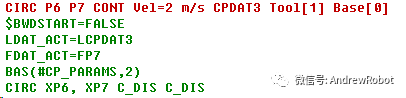
3.CIRC圆弧运动:
4.带S指令,例如:SPTP
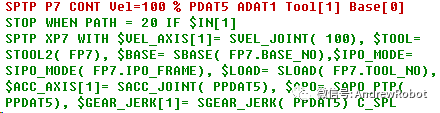
注意:带S运动指令不会直接使用BAS的功能,但是会使用BAS文件里的其他带S的程序,如SBASE,STOOL等等。具体的可以仔细阅读BAS程序以及该文件下的其他子程序。
二.BAS程序代码及说明
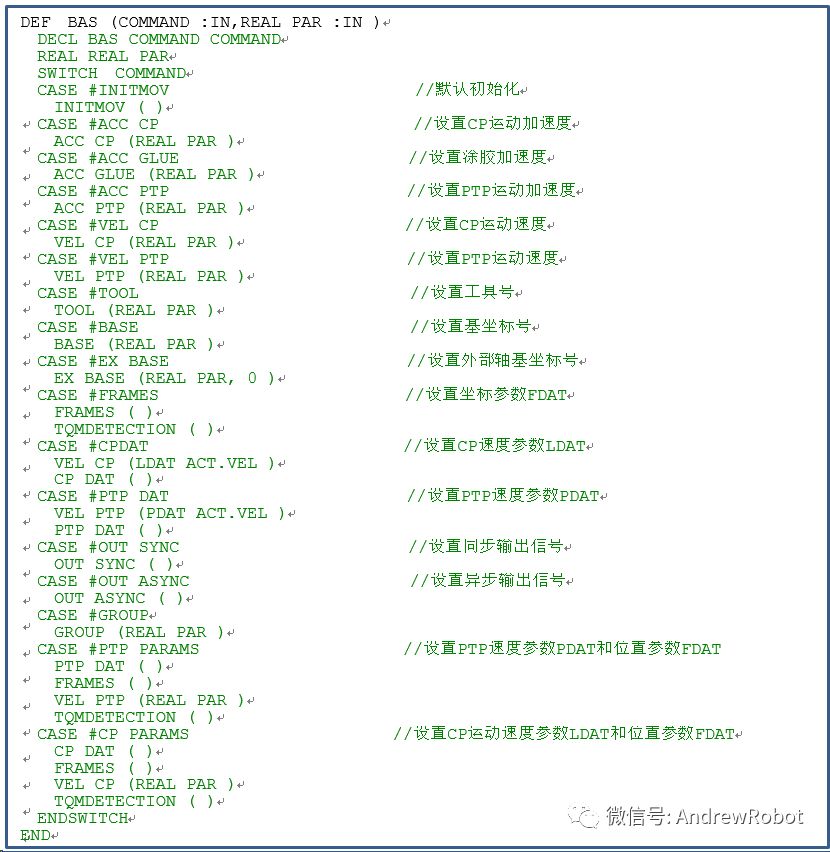
BAS程序代码为:
DEF BAS (COMMAND :IN,REAL_PAR :IN );FOLD BAS () DECL BAS_COMMAND COMMAND REAL REAL_PAR SWITCH COMMAND CASE #INITMOV INITMOV ( ) CASE #ACC_CP ACC_CP (REAL_PAR ) CASE #ACC_GLUE ACC_GLUE (REAL_PAR ) CASE #ACC_PTP ACC_PTP (REAL_PAR ) CASE #VEL_CP VEL_CP (REAL_PAR ) CASE #VEL_PTP VEL_PTP (REAL_PAR ) CASE #TOOL TOOL (REAL_PAR ) CASE #BASE BASE (REAL_PAR ) CASE #EX_BASE EX_BASE (REAL_PAR, 0 ) CASE #FRAMES FRAMES ( ) TQMDETECTION ( ) CASE #CP_DAT VEL_CP (LDAT_ACT.VEL ) CP_DAT ( ) CASE #PTP_DAT VEL_PTP (PDAT_ACT.VEL ) PTP_DAT ( ) CASE #OUT_SYNC OUT_SYNC ( ) CASE #OUT_ASYNC OUT_ASYNC ( ) CASE #GROUP GROUP (REAL_PAR ) CASE #PTP_PARAMS PTP_DAT ( ) FRAMES ( ) VEL_PTP (REAL_PAR ) TQMDETECTION ( ) CASE #CP_PARAMS CP_DAT ( ) FRAMES ( ) VEL_CP (REAL_PAR ) TQMDETECTION ( ) ENDSWITCHEND;ENDFOLD BAS ()
其中:
三.运动参数:
| 问题 | 方案 | 关键字 |
| 机器人如何记住其位置? | 工具再空间中的相应位置会被保存.(机器人位置对应于所设定的工具坐标及基坐标) | POS TOOL BASE |
| 机器人如何知道它如何运动? | 通过指定运动方式:点到点,直线或圆弧 | PTP/SPTP LIN/SLIN CIRC/SCIRC SPL |
| 机器人运动的速度有多快? | 两点之间的速度和加速度可以通过编程设定 |
VEL ACC |
| 机器人是否必须再每个点上都要停住? | 为了缩短节拍时间,点也可以轨迹逼近,但这样就不会精确暂定. | CONT |
| 如果到达某个点,工具会沿哪个方向? | 可以针对每个运动对姿态引导进行单独设置. | ORI_TYPE |
具体运动参数结构体:
| 结构体 | 元素 | 取值 | 说明 |
| PDAT | VEL | REAL型,取值:0-100 | PTP运动的速度 |
| ACC | REAL型,取值:0-100 | PTP运动的加速度 | |
| APO_DIST | REAL型,取值:0-100 | PTP运动的逼近参数 | |
| APO_MODE | ENUM:#CPTP,#CDIS | PTP运动逼近的方式 | |
| GEARJERK | REAL型,取值:0-100 | PTP运动的加加速度 | |
| LDAT | VEL | REAL型,取值:0-2.0 | CP运动的速度 |
| ACC | REAL型,取值:0-100 | CP运动的加速度 | |
| APO_DIST | REAL型 | CP运动的逼近参数 | |
| APO_FAC | REAL型,取值:0-100 | CP运动的逼近参数比值 | |
| AXIS_VEL | REAL型,取值:0-100 | CP运动轴旋转速度 | |
| AXIS_ACC | REAL型,取值:0-100 | CP运动轴旋转加速度 | |
| ORI_TYP | ENUM:#VAR,#CONSTANT,#JOINT | CP运动TCP姿态引导 | |
| CIRC_TYP | ENUM:#BASE,#PATH | 圆弧姿态引导 | |
| JERK_FAC | REAL型:0-100,默认:50 | CP运动的加加速度比例 | |
| GEAR_JERK | REAL型:0-100,默认:50 | CP运动的加加速度 | |
| EXAX_IGN | 默认值:0 | 忽略外部轴位置示教 | |
| CB | 结构体 | 圆弧运动的参数 | |
| FDAT | TOOL_NO | INT型:0-16 | 坐标系参数之工具坐标系 |
| BASE_NO | INT型:0-32 | 坐标系参数之基坐标系 | |
| IPO_FRAME | ENUM:#NONE,#TCP,#BASE | 坐标系参数之插补方式 | |
| POINT2[] | CHAR: | 点名,可以不填 | |
| TQ_STATE | BOOL:TRUE/FALSE | 扭矩监控开启或关闭 |
——————————————
-
机器人
+关注
关注
211文章
28379浏览量
206916 -
编程
+关注
关注
88文章
3614浏览量
93686
原文标题:库卡机器人编程之BAS程序
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
焊接机器人编程技巧与注意事项
节卡机器人发布JAKA MAX系列新品
里程碑!节卡机器人荣膺SGS最新版安全性能认证——国际领先的安全功能认证项目
工业机器人编程流程及注意事项
工业机器人的四种编程(示教编程、离线编程、自增强现实编程主编程)剖析!

库卡机器人获TÜV莱茵北美cTUVus及CE指令符合性证书

世界机器人大会这些趋势值得关注:机器人迈入中高端应用场景,看节卡机器人如何做?

Al大模型机器人
工业机器人任务编程基本流程
abb机器人编程指令详解中的call什么意思
ABB机器人的基本程序数据有哪些
abb工业机器人的编程语言是什么






 工商网监
工商网监
评论