 刚刚处理了一个机器人带抓手上SMC的连续故障
刚刚处理了一个机器人带抓手上SMC的连续故障
最近遇到了一个SMC故障,和大家分享一下.
SMC 输入模块无电源灯,没有电源指示,用机器人控制夹具气阀,有输出,更换IO模块故障依旧,因此判断是网络通讯模块故障并进行更换.
更换SMC阀后出现机器人阀导失灵故障,先是先导阀不亮,对先导阀进行更换,故障消除,在此试车发现最末端夹具控制阀故障,给输出信号,指示灯不亮.更换最末端阀,试车正常,工作了一台车后,气阀在此失灵,给输出信号,指示灯不亮.在断电更换阀座时,保险被烧坏.
保险烧毁后,对线路接头进行检查,发现IBS插头的24V电源插头碎了,插头损坏是造成阀导无电主要原因,是插头损坏使得电压降低.
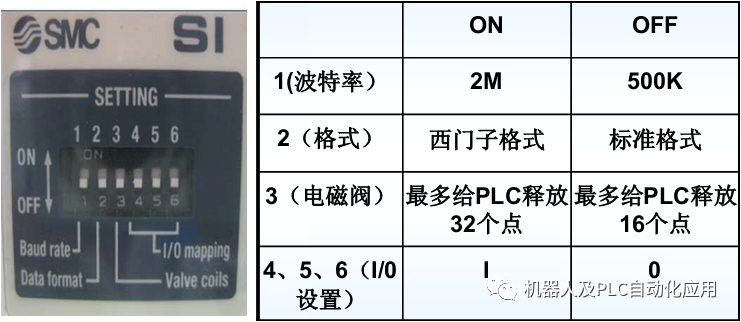
通过这个故障,我们来学习一下SMC的模块硬件机构.
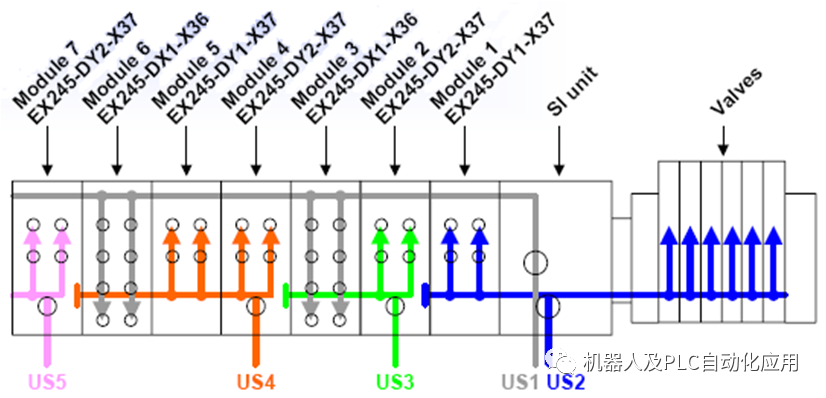
多电源系统相互独立

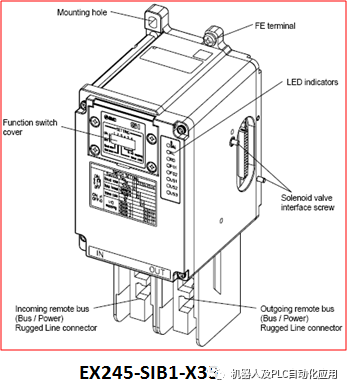

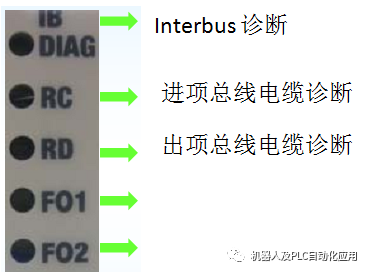
SF 系统故障-----------红色
BF 网络故障-------------红色
US1电源供给:电磁阀-----绿色
US2额外供应、载荷-------绿色
US3电源供给:传感器、输入模块-----绿色
INTERBUS模块的报警提示
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208905 -
SMC
+关注
关注
2文章
85浏览量
20388 -
网络通讯
+关注
关注
0文章
75浏览量
11319
原文标题:刚刚处理了一个机器人带抓手上SMC的连续故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主
发表于 01-04 19:22
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。机器人定位中的SLAM算法需要
发表于 01-04 01:15
【「具身智能机器人系统」阅读体验】+两本互为支持的书
最近在阅读《具身智能机器人系统》这本书的同时,还读了 《计算机视觉之PyTorch数字图像处理》一书,这两本书完全可以视为是互为依托的姊妹篇。《计算机视觉之PyTorch数字图像处理》
发表于 01-01 15:50
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行提供更加全面的感知
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+初品的体验
解决许多技术的和非技术的挑战,如提高智能体的自主性、处理复杂环境互动的能力及确保行为的伦理和安全性。
未来的研究需要将视觉、语音和其他传感技术与机器人技术相结合,以探索更加先进的知识表示和记忆模块,利用强化学习进一步优化决策过程
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
物理交互纳入智能系统的核心要素。
第3章是探讨机器人计算系统。这一章节详细阐述了自主机器人的软硬件架构。计算系统需要满足机器人任务对算法的精度、实时性和功耗要求。书中介绍的多传感器融合
发表于 12-19 22:26
开源项目!OpenCat—— 一个全能的平价四足机器人
感到厌倦。现在孩子们可以在一种新型玩具上学习物理和编程。机器人专家可以在一个便宜得多的平台上专注于他们的行走算法。软件开发人员可以在一
发表于 12-16 11:44
焊接机器人常见故障及排查
常见故障及排查方法 1. 机械故障 故障现象: 机器人关节活动受限、异常噪音、过热等。 排查方法: 检查润滑油: 确保所有关节和齿轮都有足够的润滑油。 检查磨损: 检查齿轮、轴承等是否
FMEA在工业机器人故障预防中的应用
预测,并分析这些故障对系统、操作乃至整个生产流程的影响,FMEA帮助企业提前布局,制定预防措施,将潜在风险扼杀于摇篮之中。 一、工业机器人常见故障模式 机械
Al大模型机器人
丰富的知识储备。它们可以涵盖各种领域的知识,并能够回答相关问题。灵活性与通用性: AI大模型机器人具有很强的灵活性和通用性,能够处理各种类型的任务和问题。持续学习和改进: 这些模型可以通过持续的训练
发表于 07-05 08:52
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
概述
中国制造 2025 是中国政府实施制造强国战略的第一个十年行动纲领,是全面提升中国制造业发展质量和水平的重大战略部署,其中明确指出了围绕工业机器人创新技术的重要地位。目前工业机器人
发表于 05-29 16:17
DIY推荐!自制一个基于ESP32的沙画机器人
作者在高二的时候就做过一个非常基础的沙画机器人,现在准备去普渡大学上学了,正好也打算带上它,于是想着用这俩年新学到的技能重新设计一下之前的沙画机器
发表于 04-15 15:09





 工商网监
工商网监
评论