 一个机器人进行自动化升级改造,应该加一些什么设备呢?
一个机器人进行自动化升级改造,应该加一些什么设备呢?
如果想在两个手动工位间加入一个机器人进行自动化升级改造,应该加一些什么设备呢?头脑风暴一下,应该有安全门,围栏,SICK光电,机器人,机器人E2钥匙门盒,PN/PN耦合器,这样在不添加CPU的情况下应该是最相对合理的.
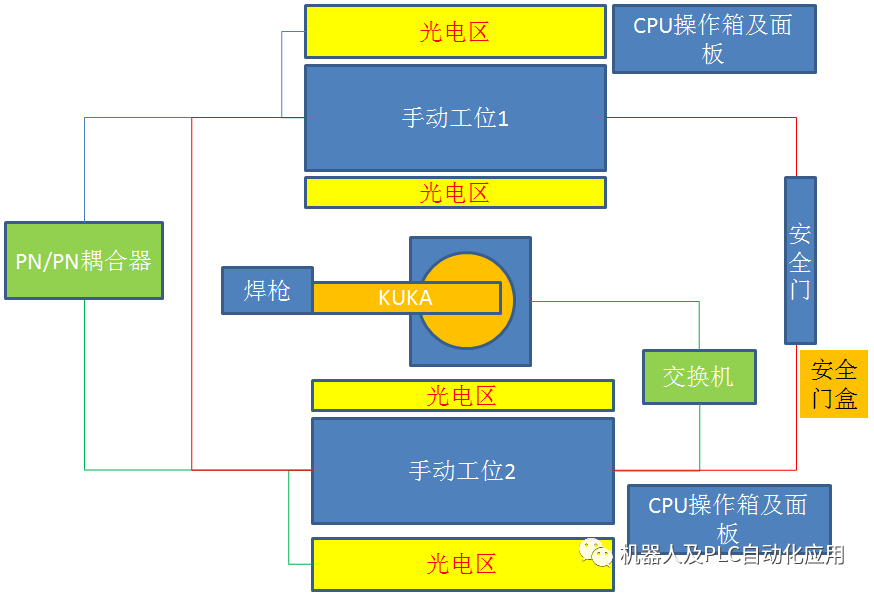
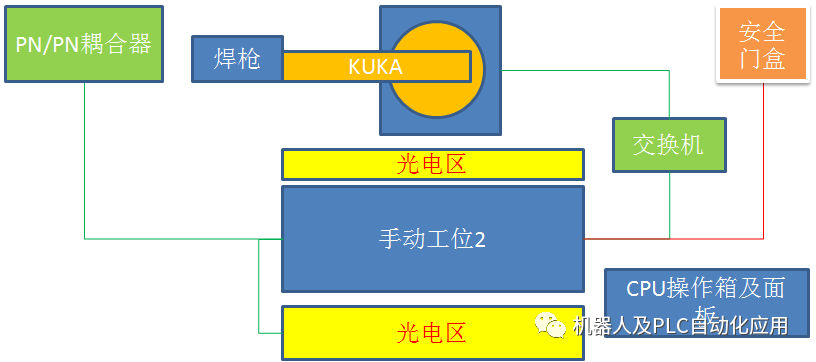
这样以2 号手动夹具为基础形成了一个小的工作组.网络布局图.
由于手动线使用小型IM151-8F PN/DP CPU ,由于需要加入机器人和光电等设备,将CPU的存储卡换成2M卡或者8M卡。
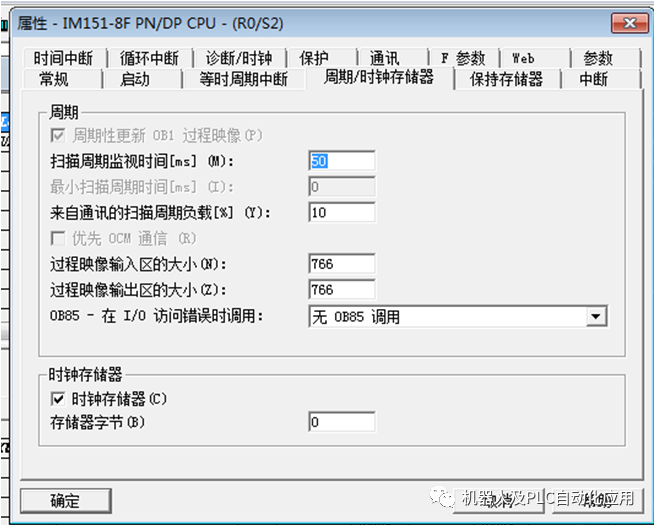
根据手动工位的IO多少,新加设备也很少,一般情况下基础设置不用改变。
根据设计可以使用C4机器人在PN网络下。
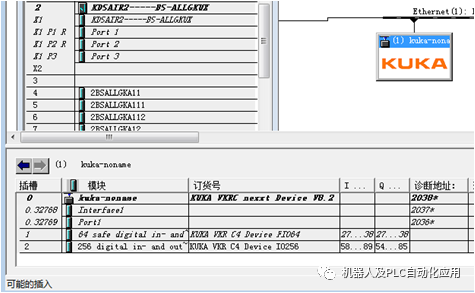

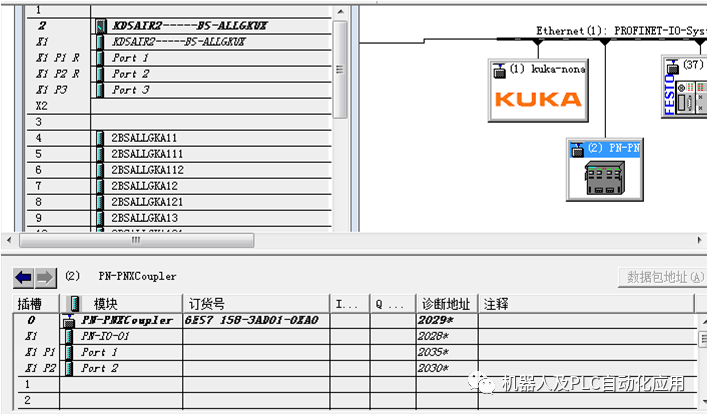
添加PN/PN耦合器与另一手动工位相关联,实现自动联动.

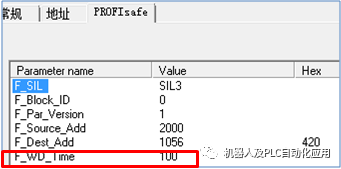
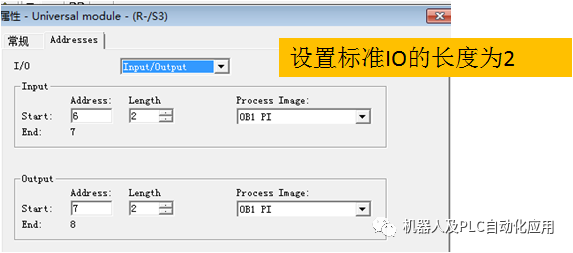
设置PN/PNCoupler的安全IO和标准IO

添加SICK光电
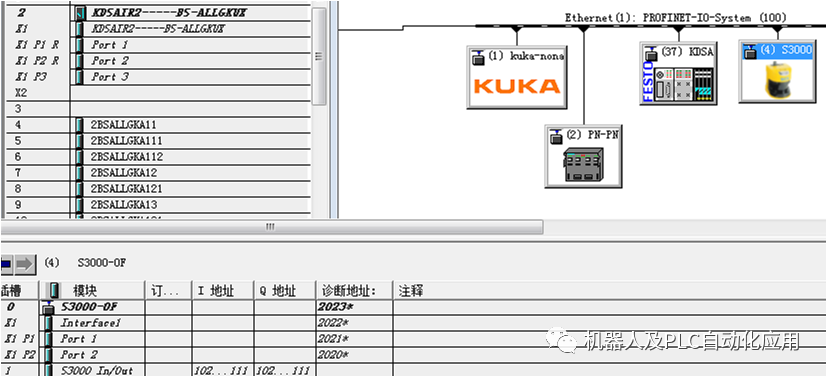
1.在现有的PLC程序中的组态程序中添加光电设备,
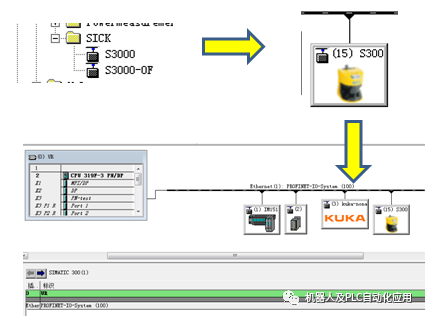
在PROFINET网络中SICK光电设备分两种,
1.铜缆网卡的SICK光电,
2.光缆网卡的SICK 光电.

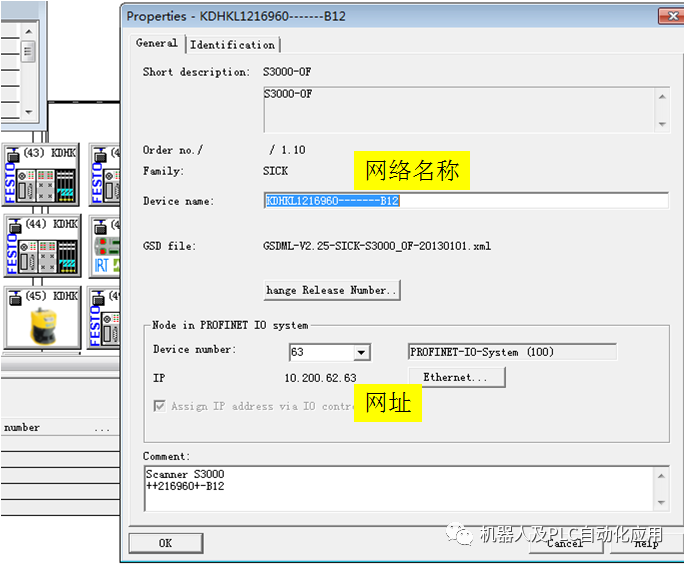
2.设置SICK光电 的网址和网络名称。
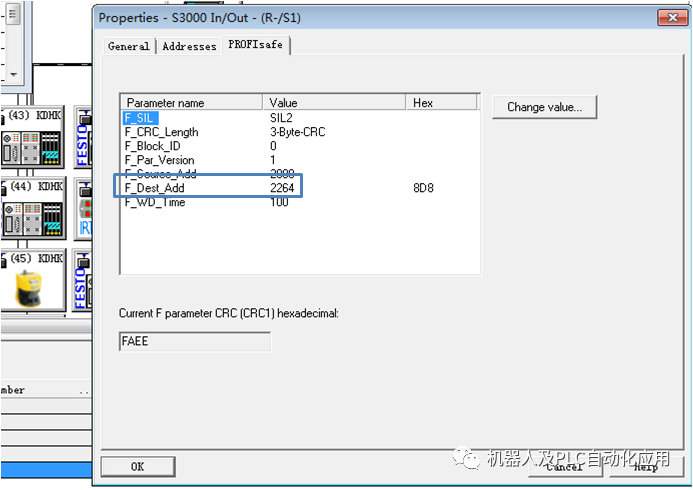
3.设置SICK光电 的安全网址。
门盒里的ET200S的调用IM151-3PN HF
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28391浏览量
206959 -
自动化
+关注
关注
29文章
5564浏览量
79246
原文标题:手动工位改自动化,快速添加机器人设计案例分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自动化新宠打开人机协同的未来,底层芯片如何赋能协作机器人发展?
电子发烧友网报道(文/李宁远)多年来,机器人一直在制造工业中扮演着重要角色。不论是大型的工业机械臂还是中小型的工业机器人,自动化工厂需要这些高效率、高精确的

开源项目!OpenCat—— 一个全能的平价四足机器人
以额外承载约 1 千克的重量(但行走速度会变慢)。它面向 STEM教育和创客社区。价格将与一些机器人汽车套件相似。
完整版使用树莓派来实现更多人工智能增强的感知功能,并指挥一个
发表于 12-16 11:44
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
的自适应性和自主性,赋能机器人在多种场景中的应用。
例如,在家庭自动化领域,具身智能机器人能够感知家庭成员的日常习惯和需求,自动执行清洁、整理或其他家务任务。它们通过观察家庭成员的活动
发表于 11-11 10:20
爱普生SG-8101CA可编程晶振应用在工业自动化机器人
机器人的卓越表现提供了坚实的支撑。高精度频率:工业自动化机器人的每一个动作都需要精确到毫米甚至微米级别,这对时钟信号的精度提出了极高的要求。爱普生SG-8101C

下一代机器人技术:工业自动化的五大趋势
随着人工智能(AI)技术的迅猛发展和全球制造业的转型升级,下一代机器人技术正在引领工业自动化领域的新一轮变革。这些变革不仅深刻影响着生产模式
认识机器人与CW32四足机器人控制项目
: 1. 定义 机器人是具有感知、决策和执行功能的自动化设备。它可以接受外部信息,进行处理,并据此执行一定的动作。 2. 组成 感知系统 :
完美CP,AGV+机械手复合机器人是下一个自动化风口吗?
随着中国制造2025、工业4.0等概念的提出,制造业对自动化、智能化生产模式的需求日益增长。传统生产制造业企业大范围向工业自动化、工业机器人方向升级

降本增效,法奥机器人助力CNC自动化升级提速
工业4.0时代,计算机数控机床(CNC)作为工业自动化的核心设备,其“智造升级”迫在眉睫。 法奥协作机器人,以其易编程、快部署、高安全等特点,助力CNC
工业机器人、PLC与自动化之间的关系
随着科技的不断进步和工业领域的快速发展,自动化已成为现代工业生产的重要趋势。在这一进程中,工业机器人和PLC(可编程逻辑控制器)作为自动化的两大核心要素,发挥着至关重要的作用。本文将深
机器人自动化焊接工作站的优点,技术特点及应用
在当今高度自动化的制造业环境中,机器人技术已经成为不可或缺的一部分。其中,机器人自动化焊接工作站以其高效、精确和稳定的特性,正逐渐改变传统焊
创想焊缝跟踪系统适配藦卡机器人进行自动化焊接的应用
起来了解创想焊缝跟踪系统适配藦卡机器人进行自动化焊接的应用。 创想焊缝跟踪系统原理 创想焊缝跟踪系统是一种基于先进视觉和控制技术的自动化焊接
创想视觉焊缝跟踪系统适配广数机器人进行自动化焊接的应用
随着制造业的发展,自动化技术在焊接领域的应用变得愈发重要。为了提高焊接质量和效率,越来越多的企业开始采用机器人进行自动化焊接。而焊缝跟踪技术作为
讲一些你不知道的,AGV和AMR移动智能机器人有哪些功能
AGV和AMR都是自动化移动设备,但它们的设计和应用场景存在一些差异,选择取决于具体的应用需求和环境。






 工商网监
工商网监
评论