 8.3系统中MAKRO57的最新用法分析
8.3系统中MAKRO57的最新用法分析
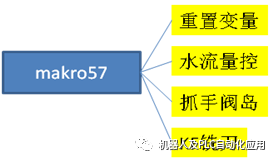
例如: 下面是电伺服焊钳中的用法.
Makro57(ADV :IN)
--重置变量--
TECH2 AlleKonfigurationen=zuruecksetzen Techaufruf=EIN
VW_USR_R(#USR_MAKRO,201,2100,1,1,1,1,1,1,1,1,TRUE)
–暂时没用--
TECH1 RZ Steuerung=Nr1 stationaerTechaufruf=EIN
VW_USR_R(#USR_MAKRO,107,1,2,1,1,1,1,1,1,1,TRUE)
水流量控
TECH4 Roboter-RIP RIP=Nr1Kuehlwasser-Sensor=Ausw.KW min/max Ventil=Bistabil Kontrolle Niederdruck=EINTechaufruf=EIN
VW_USR_R(#USR_MAKRO,407,4701,2,2,2,2,1,1,1,1,TRUE)
转手阀岛上使用几个控制阀
TECH4 Ventilinsel Hersteller=Rueckm.Steuerluft vorh. Greifer-Ventilinsel Nr1=vorhanden Greifer-VentilinselNr2=nicht vorhanden Greifer-Ventilinsel Nr3=nicht vorhanden Saugkreise=nichtvorhanden ND-Abfrage an Greifer-Ventilinsel=Nr1 nicht vorhanden Slave-Startadresse=vordefiniertTechaufruf=EIN
VW_USR_R(#USR_MAKRO,404,4402,2,1,1,0,1,1,1,0,TRUE)
----
KF铣刀
TECH2 KF Steuerung=Nr1Ausfuehrung=Wechsler(Sintherleghe) Normalfraesen mit 1Hub KF Ausblasen beiZange schliessen ohne Versetzeinheit Slave-Startadresse(nurWechsler)=vordefiniert Techaufruf=EIN
VW_USR_R(#USR_MAKRO,204,2401,5,1,1,0,1,0,1,0,TRUE)
–是否使用自动电极帽更换器--
F537 = AUS
F534 = AUS
– 是否使用“ Sinterlegh“牌的电极帽更换器--
F808 = AUS
F564 = EIN 使用铣刀1 F_KF_mit_VE[1]=564
F321 = EIN 在原位控制A23的安全门允许进入
------------------------------------------------
-------------------------------------------------
TECH2 AlleKonfigurationen=zuruecksetzen Techaufruf=EIN
VW_USR_R(#USR_MAKRO,201,2100,1,1,1,1,1,1,1,1,TRUE)
--重置变量--
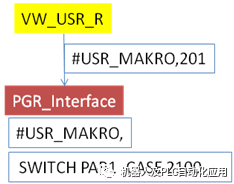
SWITCH PAR1 ---初始化变量
-
伺服
+关注
关注
16文章
652浏览量
41020 -
变量
+关注
关注
0文章
613浏览量
28420
原文标题:8.3系统中MAKRO57的最新用法分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
安科瑞Acrel-1000DP分布式光伏监控系统在8.3MWp分布式光伏发电中的应用
CBM99D57BQ
1 GSPS正交数字上变频器,内置18位IQ数据路径和14位DAC-CBM99D57

SUMIF函数在数据分析中的应用

Linux lsof命令的基本用法






 工商网监
工商网监
评论