 KUKA-C4标准版机器人启动时序
KUKA-C4标准版机器人启动时序
1.T1模式下选择CELL程序,手动执行程序,注意中间路径,有时机器人不在HOME点附近,回原点的过程中需慢速运行,直至到达BCO。
2.松开执行键,重新按下,信息栏出现“运行方式错误”提示,点击信息栏上的“全部OK”确认消息,松开驱动及运行键,把机器人的运行模式打到“外部自动”即可。

PLC控制机器人启动时序
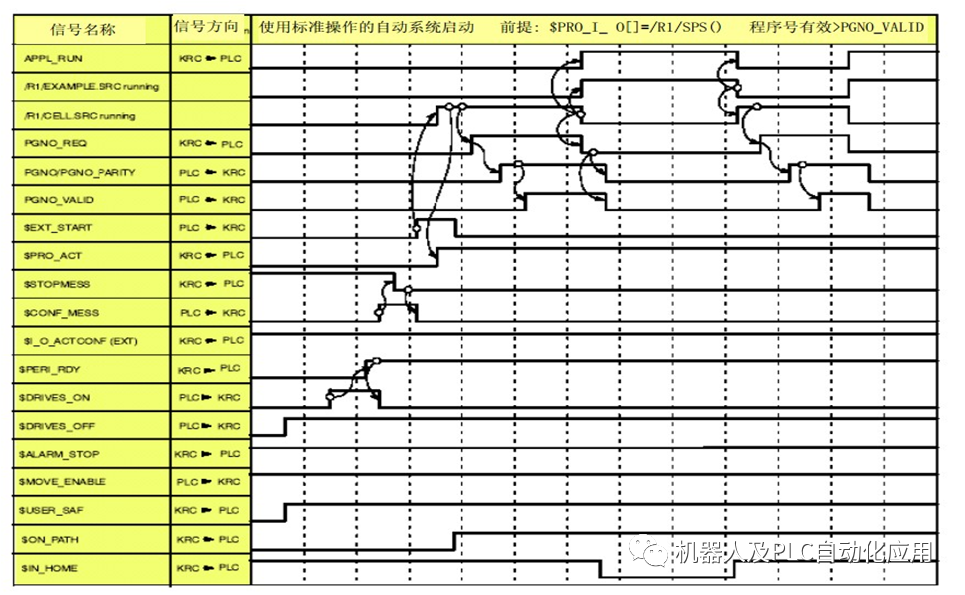
1、机器人发给PLC信号$IN_HOME、$EXT_AUTO、$ALAM_SOTP、$SUSER_SAF、$ON_PATH,如果信号缺失,检查机器人信号后重新上自动;
2、PLC在机器人发送信号齐全的前提下发给机器人信号move_enable和drives_off;
3、发完上面2个信号后,PLC发给机器人drives_on信号;
4、机器人接收到信号drives_on后,发给PLC信号$PERI_RDY,PLC接收到该信号后把drives_on信号断开;
5、drives_on断开后,PLC发给机器人conf_mess信号,信号conf_mess把信号stop_mess断开,stop_mess断开后0.5秒conf_mess也断开;
6、PLC发出ext_start信号启动程序之后,机器人PRO_ACT信号输出,EXT_START信号断开;
7、CELL程序启动之后,机器人发出PGNO_REQ信号请求程序号;
8、PLC发出程序号,之后是否校验,由现场配置决定;
9、PLC发送的程序号有效,机器人开始运行,进入调用程序。
-
机器人
+关注
关注
211文章
28416浏览量
207063 -
plc
+关注
关注
5011文章
13291浏览量
463270 -
信号
+关注
关注
11文章
2791浏览量
76754
原文标题:KUKA-C4标准版机器人启动时序
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
如何在没有软启动方程的情况下测量和确定软启动时序?
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
思岚科技亮相智能机器人分级分类评价创新论坛
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
软启动启动时,启动电流大,如何调整
工业机器人仿真软件有哪些

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
广东省具身智能机器人创新中心正式启动,奥比中光参股
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论