 KUKAC2老机器人调试工作,帮助客户解决了摆臂.
KUKAC2老机器人调试工作,帮助客户解决了摆臂.
近日参加了C2老机器人的调试工作,帮助客户解决了摆臂的停摆问题.
PTP VB=100% VE=0% ACC=100% Wzg=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A852 = AUS
3: A225 = EIN摆臂电机转动
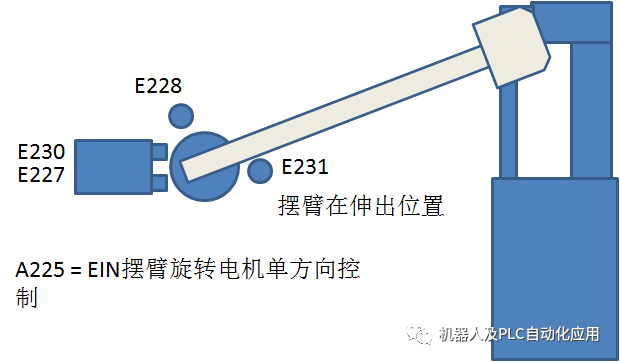
4: WARTE BIS E231 & !E227摆臂电机转动到伸出位置
5: A225 = AUS
6: bin2 ( EIN ) = 128
7: USER_S9_Teil_1_SZ Nr1 P-Nr=131 - - SST_P-Nr=131 - EIN
9: F56 = EIN
10: F57 = AUS
11: F58 = AUS
12: F59 = AUS
13: SPSMAKRO67 = F62 + F63 铣削
14: WARTE BIS E125 & !E126 & E127 焊钳打开到位
15: A225 = EIN 摆臂电机转动
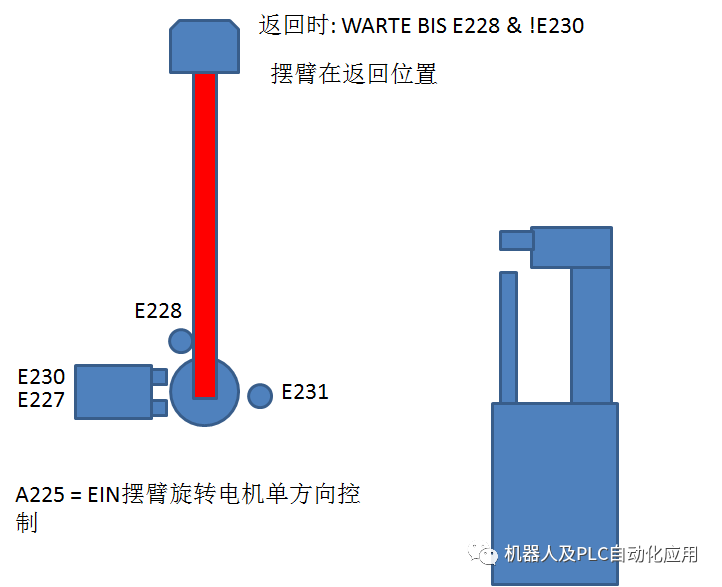
16: WARTE BIS E228 & !E230 摆臂电机转动到返回位置
在进行手动操作摆臂的位置不能正确调整和优化.
摆臂控制由于IO控制的改变不能实现电机转动时实现自动到位停止功能.
在VW_USR_S 程序INIT里控制终断程序
GLOBAL INTERRUPT DECL 2 WHEN $IN[E231] ==TRUE DO KS_Abschalten()
INTERRUPT ON 2
GLOBAL INTERRUPTDECL 3 WHEN $IN[E228] == TRUE DO KS_Abschalten()
INTERRUPT ON 3
KS1_Arbeit:235=>E231 伸出到位 WARTEBIS E231 & !E227翻转到伸出位
KS1_Ruhe:234=> E228 返回到位 WARTE BIS E228 & !E230 翻转到返回位
KS_Abschalten()关闭摆臂铣刀程序
GLOBAL DEF KS_Abschalten() 将A234改为A225 实现了控制摆臂旋转电机功能
IF ( $OUT[225] OR $OUT[235] OR $OUT[362] OR $OUT[363] OR $OUT[2011] OR$OUT[2012] OR $OUT[2021] OR $OUT[2022]) THEN
$OUT[234] = FALSE A225 = EIN翻转电机启动
$OUT[235] =FALSE
$OUT[362] =FALSE
$OUT[363] =FALSE
$OUT[2011] =FALSE
$OUT[2012] =FALSE
$OUT[2021] =FALSE
$OUT[2022] =FALSE
ENDIF
-
机器人
+关注
关注
210文章
28190浏览量
206462 -
电机
+关注
关注
142文章
8929浏览量
145069
原文标题:KUKAC2老机器人调试工作,帮助客户解决了摆臂.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
码垛机器人的组成和工作原理
大象机器人开源协作机械臂机械臂接入GPT4o大模型!

焊接机器人调试技巧有哪些

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)

具身智能机器人开发平台再添新秀!广和通发布基于高通高算力芯片的Fibot

广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot

机械臂和移动机器人两种控制系统方案对比

自动化革命:大象机器人的Mercury A1机械臂

焊接机器人怎么确定摆幅方向的
大象机器人首发万元级水星Mercury人形机器人系列






 工商网监
工商网监
评论