 RT-Thread编程高阶用法-函数扩展之$Sub$$与$Super$$
RT-Thread编程高阶用法-函数扩展之$Sub$$与$Super$$
前面移植了RT-Thread Nano,其实准确来说那不叫移植,那叫做部署,因为移植的工作官方已经帮我们做好了。
1、引发思考-相关资料检索
在之前的文章提到过,RT-Thread已经提前在main函数以前就把跟硬件配置、系统初始化、启动调度器等相关的都做好了,所以我们后来看到的main函数非常简洁,真是让人感觉神清气爽,有继续往下写代码的欲望,如下:
main.c
int main(void) { while(1) { rt_kprintf("Hello RTT_NANO "); HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); rt_thread_mdelay(500); } }
那具体RT-Thread又是如何实现在main函数执行之前就把所有初始化硬件、时钟的工作都做了呢?跟随官方文档的RT-Thread代码启动流程:

跟代码,最后发现如下代码:
/* re-define main function */ int $Sub$$main(void) { rtthread_startup(); return 0; } /* the system main thread */ void main_thread_entry(void *parameter) { extern int main(void); extern int $Super$$main(void); /* RT-Thread components initialization */ rt_components_init(); /* invoke system main function */ #if defined(__CC_ARM) || defined(__CLANG_ARM) $Super$$main(); /* for ARMCC. */ #elif defined(__ICCARM__) || defined(__GNUC__) main(); #endif }
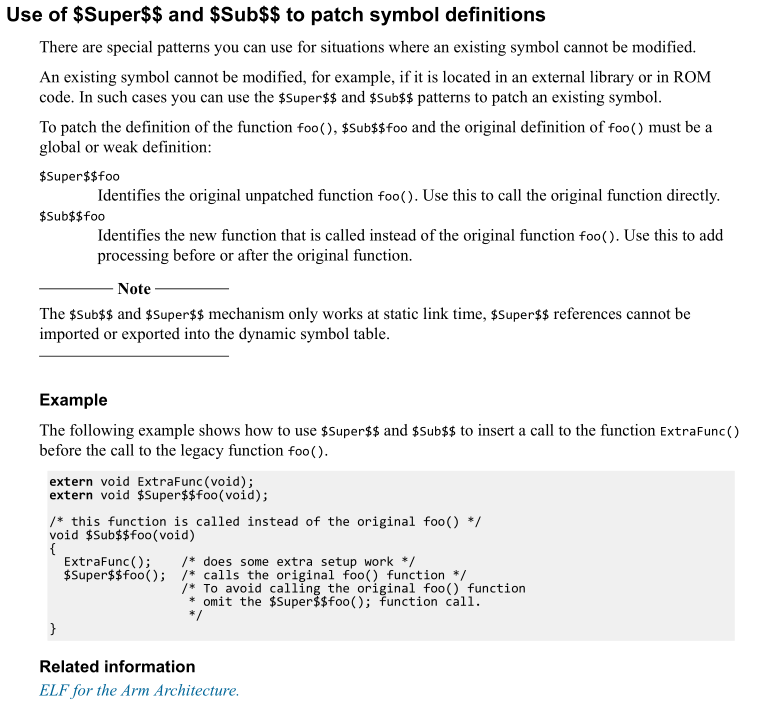
平时工作开发中没用到这样的语法,于是只能搜索文档来看看到底是如何实现的,果然在Keil帮助手册中找到了答案:

从文档中得知,Keil MDK编译器用$Sub$$和$Super$$这两个符号来扩展了 main 函数,这使得使用$Sub$$main可以在main函数执行之前就预先执行$Sub$$main函数,所以在$Sub$$main函数里就可以完成一些基本的硬件、时钟初始化功能,做完这些工作以后,还是得跳转到main函数去执行往后逻辑的呀,这就需要通过调用$Super$$main来实现了。(注:在Keil MDK编译器中是这样的情况,但在IAR以及GCC环境下有差别,这里不做分析,等后面用到再说)。
既然main函数之前能这么用,是不是换个函数也能这么用呢?这引发我的好奇,于是继续查找文档,在armlink_user_guide手册中找到:
接下来开始做实验,然后我用stm32cubeMX生成一个基本裸机工程,下载到小熊派上来验证是否正确。
2、小熊派上进行实践
2.1 基本功能配置
配置外部时钟、调试串口、调试接口以及LED

最后生成代码。
2.2 编写代码进行验证
首先添加一个串口重定向函数,后面才能使用printf
int fputc(int ch,FILE *file) { return HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,1000); }
接下来结合文档模仿RT-Thread写出以下函数:
void $Sub$$main(void) { extern int main(void); extern int $Super$$main(void); //初始化HAL HAL_Init(); //初始化系统时钟 SystemClock_Config(); //初始化GPIO MX_GPIO_Init(); //初始化串口 MX_USART1_UART_Init(); printf("初始化已完成 "); //点灯 HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); //回到真正的main函数里 $Super$$main(); }
main函数如下:
int main(void) { //延时2s HAL_Delay(2000); printf("回到main函数中 "); while(1) { HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); HAL_Delay(500); } }
将程序编译后下载到小熊派开发板中,然后打开串口调试助手可以看到:
由此可见,这是一个很有逼格的技能,以后可以在支持这种扩展符号的编译器下将这种技能应用起来,从而简化代码,接下来我们再往上面这个程序里添加功能:添加Function函数和在它之前运行的$Sub$$Function,然后在main函数里调用Function函数:
void $Sub$$Function(void) { extern void Function(void); extern void $Super$$Function(void); printf("在Function函数之前调用$Sub$$Function "); $Super$$Function(); } void Function(void) { printf("执行Function函数 "); } int main(void) { //延时2s HAL_Delay(2000); printf("回到main函数中 "); //调用Function函数 Function(); while(1) { HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); HAL_Delay(500); } }
然后编译后将程序下载到小熊派开发板后,通过串口调试助手看到:

至此,我们已经完全弄明白RT-Thread是如何实现在main函数执行之前就把初始化硬件、系统初始化、启动调度器等工作都完成了的基本原理。
-
函数
+关注
关注
3文章
4331浏览量
62594 -
编译器
+关注
关注
1文章
1634浏览量
49128 -
RT-Thread
+关注
关注
31文章
1288浏览量
40116
原文标题:RT-Thread编程高阶用法-函数扩展之$Sub$$与$Super$$
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【S32K146 RT-Thread】之 使用SFUD组件驱动spi flash

RT-Thread上CAN实践
开源共生 商业共赢 | RT-Thread 2024开发者大会报名启动!
2024 RT-Thread全球巡回 线下培训火热来袭!
【好书推荐】RT-Thread设备驱动开发指南
RT-Thread 新里程碑达成——GitHub Star 破万!
基于 RT-Thread专业版的EtherCAT主站方案
6月6日杭州站RT-Thread线下workshop,探索RT-Thread混合部署新模式!
2024 RT-Thread 全球技术大会演讲议程发布!
新书发布——《实时操作系统应用技术:RT-Thread与ARM编程实践》
RT-Thread混合部署Workshop北京站来啦!
4月25日北京站RT-Thread线下workshop,探索RT-Thread混合部署新模式
4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!

4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!
恩智浦半导体正式加入RT-Thread全球合作伙伴计划!





 工商网监
工商网监
评论