 机器人主气缸C50气管连接说明
机器人主气缸C50气管连接说明
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象。在作机器人E1轴移动时报拉拽故障。下面让我们分析一下气路。
伺服焊的第七轴(MQB)随动:
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程。
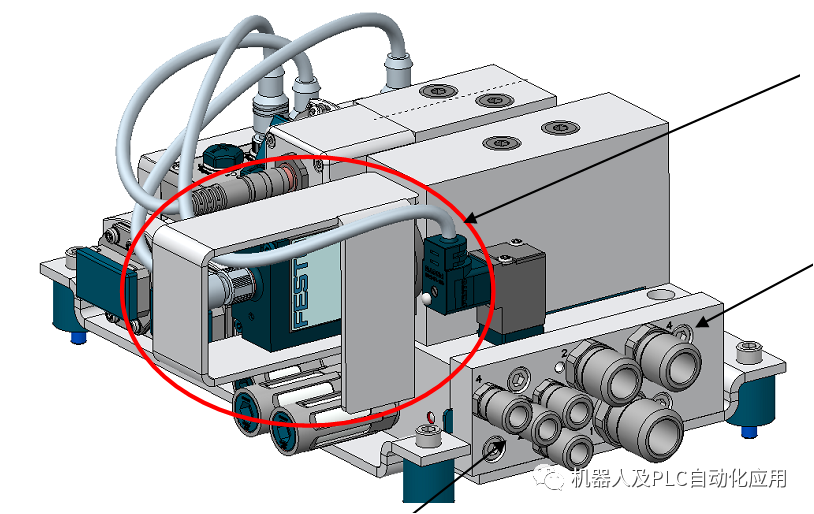
(FESTO伺服焊钳控制器)
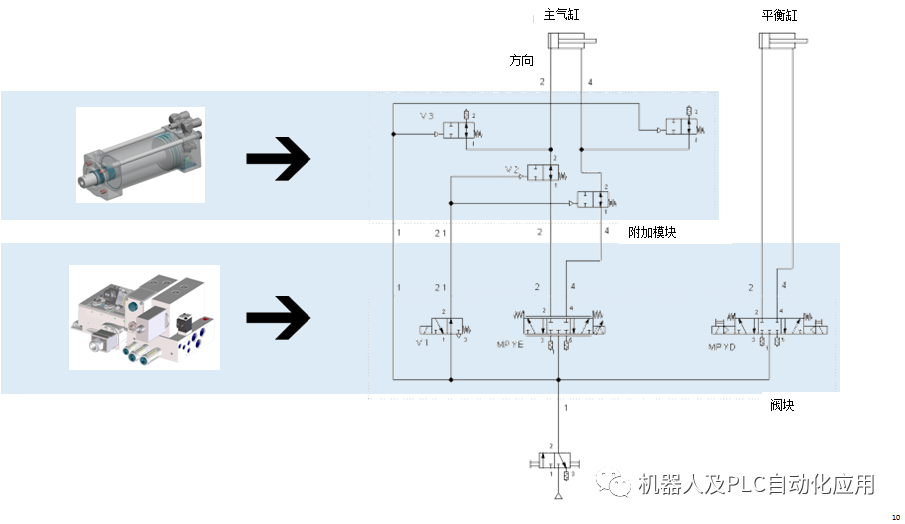
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
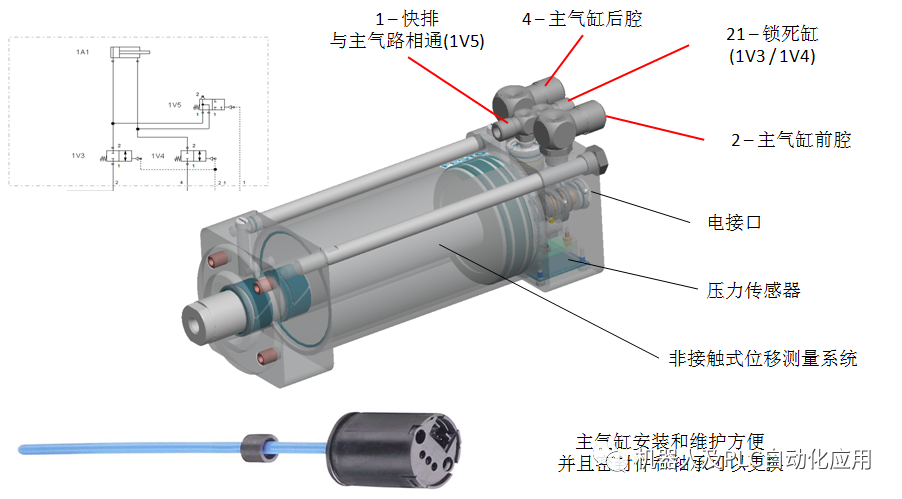
主气缸(C50)气管连接说明图:
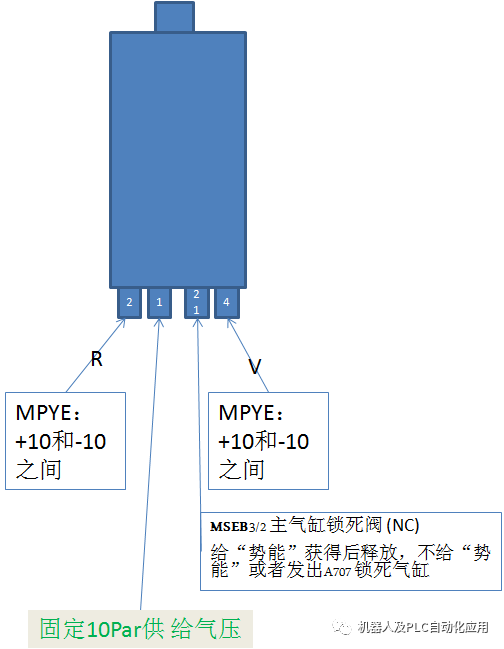
MSEB:控制锁死阀,给主气缸21的解锁压力不大
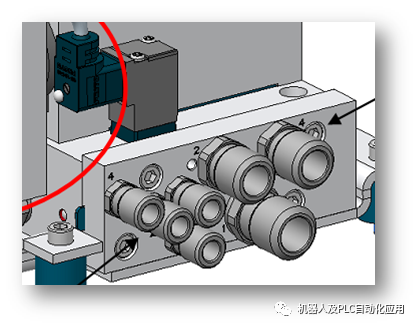
注意:阀座出气口的标号1/21是接到主气缸上的1/21的。
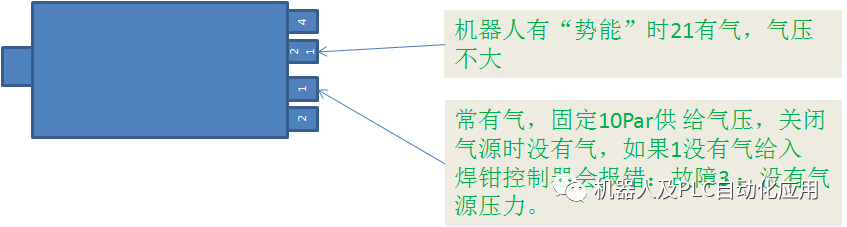
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制)。
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力。
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障。
1.检查气源供给。检查气管连接。
2.检查主气缸附加块(隔断阀)。
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16361浏览量
178030 -
机器人
+关注
关注
211文章
28418浏览量
207084 -
监控
+关注
关注
6文章
2208浏览量
55197
发布评论请先 登录
相关推荐
厂区内的机器人连接器:默默无闻的精密使者
在现代化的厂区中,机器人如同高效的工人,不知疲倦地执行着各种任务。然而,在这群钢铁巨人的背后,有一群默默无闻的精密使者——机器人连接器。它们虽小,却承载着巨大的责任,厂区内机器人
丰坦机器人入选“2024值得关注的硬科技创变者50强”
机器人”)成功入选“2024值得关注的硬科技创变者50强”。公司创始人兼CEO李自可受邀出席,并参与焦点对话环节。荣获“硬科技创变者50强”,来自行业的认可“硬科技创

复合机器人在3c电子行业的应用
时代在发展科技在进步,复合机器人在3C电子行业中的应用已经变得越来越广泛,它们以高效、精确和灵活的特点,为3C电子产品的生产带来了显著的变革。以下是对复合机器人在3
BD工业级除草机器人连接器
高颜“实力派”:BD系列工业级连接器为除草机器人带来高端连接新方案 电动除草机器人,以其更智能、高效率、无环境污染的特质,堪称除草界的“高大上”。作为一款电驱的

气缸磁性开关怎么接线
气缸磁性开关是一种用于检测气缸活塞位置的传感器,广泛应用于自动化设备、机器人、气动控制系统等领域。 一、气缸磁性开关的工作原理 气缸磁性开关
柔性机器人和刚性机器人有什么区别?
则由刚性杆及其关节连接构成,运动自由度相对较少。控制方式:柔性机器人通常采用基于力和视觉感知的控制系统,而刚性机器人则主要采用编程控制。应用领域:柔性机器人主要应用

机器人主控器的主控芯片在功能上与什么相似
本文将深入探讨机器人主控器的主控芯片,分析其在功能上与其他技术产品的相似之处。 一、引言 随着科技的不断进步,机器人技术在各个领域得到了广泛应用。机器人主控器作为机器人系统的大脑,其性
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
配电房挂轨巡检机器人
晟机器人推出B3系列升降云台轨道机器人将改变传统的人工巡检模式,实现智能升级,为配电房的安全稳定运行保驾护航。 一、巡检机器人产品概述 B3系列升降云台轨道机器人主要由轨道、
YM20包胶款工业级连接器解决AGV搬运机器人电源连接需求
级连接器来承担电源连接的角色。YM20包胶款连接器用于AGV搬运机器人对于AGV搬运机器人,需要用到更可靠和更适应车载与车间环境的工业级

EPSON助力智能泳池清洁机器人导航
与家用扫地机器人相同的部分是目前泳池清洁机器人主要还是随机式行走,没有加入路径规划部分,清洁效率较低,未来将很快步入规划式时代。不同的部分是泳池内的环境与家用扫地机

工业机器人连接解决方案
工业机器人工业机器人是一种自动化机器,可以在工业环境中执行各种任务,例如搬运、焊接、装配、检测等。它们通常由机械臂、控制器、传感器等部分组成,可以通过编程和自动化技术实现高效、精准的生产。工业

机器人的前世今生
机器人主要是用于代替人工作的,首先它是一个机器。对于传统的机器,被使用者设计制造出来后,它的工作步骤、路径都是确定的。机器的设计也是根据它所应用的工作而进行的。
发表于 12-29 14:54
•561次阅读






 工商网监
工商网监
评论