 KUKA 8.3系统节能功能使用分析
KUKA 8.3系统节能功能使用分析
PROFIenergy可用来通过PROFINET 网络控制能耗。为此要使用让负载对计划内和计划外中断作出反应的命令。
PROFINET Device 支持 PROFIenergy。在使用 PROFIenergy时,机器人控制系统通过 PROFIenergy协议与上一级控制系统通讯。
选项卡 PROFIenergy
机器人控制系统支持以下的 PROFIenergy状态:
2. 驱动总线关闭:驱动装置已关闭。
3.Hibernate :控制系统处于休眠状态并且只对 WakeOnLan包有反应。
4. 制动器已制动:已制动制动器并且只对下一个运行指令有反应。
如果生产歇工很短,为了使用状态驱动总线关闭,则可以用状态制动器已制动节能。但是,只有在机器人控制系统处于编程停止状态下时,才能激活状态制动器已制动。
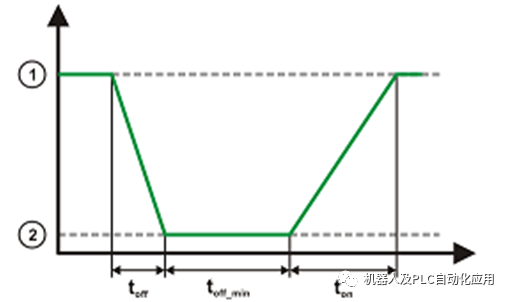
1状态Ready_To_Operate.
2状态驱动总线关闭、Hibernate 或制动器已制动.
PROFIenergy状态有以下特征:
Time_to_Pause (t off)
直到控制系统从状态Ready_To_Operate达到状态驱动总线关闭、Hibernate 或制动器已制动的时间间隔。
Time_min_length_of_stay (t off_min)
控制系统保持在驱动总线关闭、冬眠或制动器已制动状态时的时间间隔。在驱动总线关闭和冬眠状态时,所有已连接的设备在该时间间隔中应当在重新启动控制系统之前能完全关机。
Time_to_operate (t on)
直到控制系统从状态驱动总线关闭、Hibernate 或制动器已制动到达状态 Ready_To_Operate的时间间隔。
歇工时间的默认值与最小值相符。不能超过这些值。
可以通过安装其它应用程序包提高歇工时间。建议在投入运行时测试所需的歇工时间。
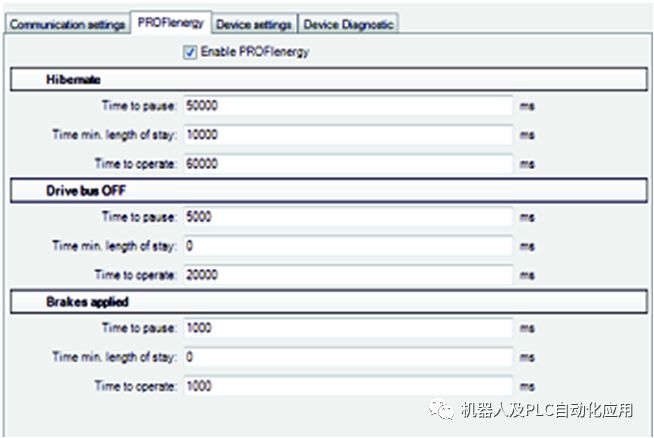
激活 PROFIenergyn
勾选:使用PROFIenergy。
未勾选:不使用 PROFIenergy。
默认设定:未勾选
休眠
暂停时间:输入控制系统直到已达到冬眠状态允许需要的时间。
默认值:50000ms
停留时间长度 (分钟):
输入控制系统应该保持在冬眠状态下的最小时间。
默认值:10000ms
运转时间:输入控制系统直到已达到 Ready_To_Operate状态允许需要的时间。
默认值:60000ms
关闭驱动总线
暂停时间:输入控制系统直到已达到驱动总线关闭状态允许需要的时间。
默认值:5000ms
停留时间长度 (分钟):
输入控制系统应该保持在驱动总线关闭状态下的最小时间。
默认值:0ms
运转时间:输入控制系统直到已达到 Ready_To_Operate状态允许需要的时间。
默认值:20000ms
制动制动器
暂停时间:输入控制系统直到已达到制动器已制动状态允许需要的时间。
默认值:1000ms
停留时间长度 (分钟):
输入控制系统保持在制动器已制动状态下的最小时间。
默认值:0ms
运转时间:输入控制系统直到已达到 Ready_To_Operate状态允许需要的时间。
默认值:1000ms
PROFIenergy指令
PLC 可借助PROFIenergy指令向机器人控制系统发出切换状态或询问信息的信号。为了能够切换状态,机器人控制系统必须处于 AUT EXT 运行模式下。

支持以下 PROFIenergy指令:
Start_Pause
机器人控制系统切换到驱动总线关闭状态。
End_Pause
机器人控制系统重新从冬眠 / 驱动总线关闭状态启动。
Start_Pause_with_time_response
为了切换状态,询问机器人控制系统总共需要的时间 (toff, t on和 t off_min)。
Info_Sleep_WOL
查明设备中有关 PE_sleep_mode_WOL状态的信息。
Go_WOL
将设备设置到状态 PE_sleep_mode_WOL(冬眠)中。
Get_Measurement_List 询问所有支持测量的 ID。
KR C4 可提供3 个测量值供使用:
nID = 1: 当前能耗在100 毫秒内的平均值,单位:kW
n ID = 2: 上一个小时的能耗,单位:kW/h
n ID = 3: 测量启动和停止之间的能耗,单位:kW/h
PLC 制造商可提供用于控制指令的模块。PLC 可自动执行几个用户不能执行指令。
在西门子文件CommonApplication Profile PROFIenergy中,对使用 PROFIenergy指令和更多其它信息进行了说明。
询问机器人控制系统的节能模式
用 IOCTL函数可以询问机器人控制系统的节能模式。
RET = IOCTL("PNIO-DEV",1002,0)
RET 的返还值:
-1. 出错
1 .机器人控制系统处于驱动总线关闭的状态下
2.机器人控制系统处于制动器已制动的状态下
255 .机器人控制系统处于待机的状态下
256 .PROFIenergy未初始化
257 机器人控制系统处于过渡状态下
通过 PROFINET进行电源管理
以下信号可供用于激活或停用各种节能模式以及识别机器人控制系统的状态。
这些功能只能在运行模式 EXT 下执行,而不能在T1 或 T2 下执行。
电源管理指的不是 PROFIenergy。电源管理信号在目录C:KRCROBOTERConfigUserCommon 下的文件 CabCtrl.xml 中进行配置。

输入字节 0
| 0位AB驱动总线 | 0 =接通驱动总线,条件:HIB = 0和KS = 0 | 1 =关断驱动总线,条件:HIB = 0和KS = 0 |
| 1位HIB休眠 | 0 =无功能 | 1 =使控制器休眠,条件:AB = 0和KS = 0 |
| 2位KS冷启动 | 0 =无功能 | 1 =使控制器冷启动,条件:AB = 0和HIB = 0 |
| 3 … 7 RES备用 |
输出字节 0
| 0位AB驱动总线 | 0 =驱动总线已接通 | 1 =驱动总线已关断 |
| 1位BBS机器人控制系统的待机运行状态 | 0 =机器人控制系统尚未做好运行准备 | 1 =机器人控制系统已经准备就绪 |
| 2 … 7 RES备用 |
-
控制系统
+关注
关注
41文章
6542浏览量
110466 -
机器人
+关注
关注
210文章
28191浏览量
206482
原文标题:KUKA 8.3系统节能功能使用分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
离心泵的四种主流节能技术分析
节能系统降低照明能耗
KUKA库卡机器人伺服驱动器相关型号举例
节能管理系统有哪些平台
KUKA 8.3系统节能功能使用分析

简单介绍KUKA外部轴应用

KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
更改KUKA C 4 Windows系统的密码
企业节能管理系统 能耗分析系统





 工商网监
工商网监
评论