 KUKA电伺服焊钳测量原理分析
KUKA电伺服焊钳测量原理分析
user测量程序:
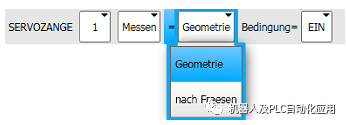
Geometrie:
初始化
在以下情况下必须完成:
•启动时
•每次更换电极后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循环初始化
•循环初始化必须在瓶盖铣削之后进行,使用在WorkVisual中在初始化力盖下配置的力。

焊钳测量USER程序:
P1 =选择钳子(钳子编号)
P2 =技术选择(测量)
P3 =方法-几何/铣削后
P4 =条件-执行命令的条件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 测量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE条件
MovementType:SG_PTP运动类型
PointCoord:P8 工作点号
GunNumber:1 枪号
InitType: #SAME/#NEW 测量类型:#SAME铣削后测量,#NEW更换电极测量

1.SGL_CalcWear 测量损耗
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服
+关注
关注
16文章
648浏览量
40927 -
测量
+关注
关注
10文章
4822浏览量
111210 -
KUKA
+关注
关注
3文章
217浏览量
16508
原文标题:KUKA电伺服焊钳测量原理分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
陆地移动无线电调制分析仪的技术原理和应用场景
陆地移动无线电调制分析仪是一种专用于陆地移动无线电(LMR)系统的高性能测试设备,其技术原理和应用场景如下:技术原理陆地移动无线电调制分析仪
发表于 11-05 14:28
电涡流位移传感器的测量原理是什么
电涡流位移传感器是一种利用电磁感应原理测量物体位移的传感器。它具有高精度、高稳定性、抗干扰能力强等优点,广泛应用于工业自动化、精密测量等领域。 一、电涡流位移传感器的
交流伺服电机与直流伺服电机的对比分析
伺服电机作为现代工业自动化领域的核心动力元件,广泛应用于各种高精度、高效率的运动控制系统中。其中,交流伺服电机和直流伺服电机作为两种主要的伺服电机类型,各有其独特的工作原理、性能特点和
伺服压力机的优缺点分析
伺服压力机是一种利用伺服电机驱动的精密压力机,广泛应用于金属成型、冲压、拉伸、折弯等工艺。 伺服压力机的优点: 高效率: 伺服电机的响应速度快,可以实现快速的加减速,从而提高生产效率。
伺服压装机原理及结构分析
伺服压装机是一种广泛应用于工业生产中的自动化设备,主要用于实现对工件的精确压装。其工作原理是通过伺服电机驱动,实现对压装力的精确控制,从而保证压装质量。 一、伺服压装机的工作原理 伺服
伺服驱动器不上电是什么原因
的故障,导致设备无法正常工作。本文将从多个角度分析伺服驱动器不上电的原因,并提供相应的解决方案。 电源问题 伺服驱动器的电源问题是最常见的原因之一。电源问题主要包括以下几个方面: 1.
伺服电子变压器输出电压怎么测量
伺服电子变压器是一种特殊的变压器,主要用于伺服电机的驱动和控制。它具有高效率、高稳定性、高响应速度等特点,广泛应用于工业自动化、机器人、数控机床等领域。本文将详细介绍伺服电子变压器输出电压的测
伺服放大器和伺服驱动器的区别
在工业自动化领域,伺服放大器和伺服驱动器都是至关重要的控制组件,它们共同协作以实现对伺服电机的高精度控制。然而,尽管两者在功能上有一定的重叠,但它们在定义、功能、工作原理以及应用场景等方面存在显著的区别。本文将对
如何测量伺服电机的好坏
伺服电机作为现代工业自动化中不可或缺的重要部件,其性能的好坏直接影响到整个系统的运行效率和稳定性。因此,对伺服电机进行准确的测量和评估,确保其质量可靠,是确保整个系统高效运行的关键。本文将详细介绍
伺服电机对拖测功机
伺服电机对拖测功机是一种广泛应用于工业领域的测试设备,它主要用于测量电机的性能参数,如功率、转速、扭矩等。本文将对伺服电机对拖测功机的工作原理、应用领域、优缺点等方面进行详细阐述,以期为读者提供全面

伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗
伺服电缸是一种通过电动机驱动实现线性运动的设备,它的原理和结构可以简单描述如下: 原理: 伺服电缸的原理基于电动机的转电磁效应和转换机械能的能力。通过电动机的正反转和电流的控制,可以实

伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗
伺服电缸通常采用闭环控制系统,通过反馈信号实时调整电机的转速和位置,以达到精确的运动控制。而伺服压机一般采用闭环或开环控制系统,通过控制液压系统或压力传感器实时调整压力或力量,以满足加工需求。
发表于 01-22 17:21
•1619次阅读
伺服驱动器输出电压的测量方法及注意事项
伺服驱动器是一种将输入信号转换为精确输出位置或速度的电子设备,广泛应用于自动化控制系统中。为了确保伺服驱动器性能的准确性和稳定性,将其输出电压测量至关重要。本文将详细介绍伺服驱动器输出
伺服驱动器输出电压怎么测量
伺服驱动器是一种用于控制伺服电机的设备,它通过输出特定的电压信号来驱动电机转动。因此,测量伺服驱动器的输出电压可以为我们提供有关电机运行状态和性能的重要信息。下面将详细介绍如何
伺服位置误差大的原因 怎么解决伺服电机定位误差过大的问题?
伺服位置误差大的原因及解决方法 伺服电机是一种精密控制装置,可以实现高精度、高稳定性的位置控制。然而,伺服电机在使用过程中常常出现定位误差过大的问题。本文将从机械结构、控制系统、环境因素、测量





 工商网监
工商网监
评论