 VASS05机器人2.20系统ProConOS_IO接口解析
VASS05机器人2.20系统ProConOS_IO接口解析
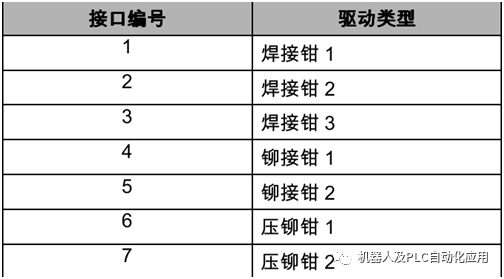
生成文件使用的接口:
接口1
接口2
接口3
接口4
接口5
接口6
接口7
2.选择激活ProConOS_IO,激活软件后开始进行寻找设备IO激活外部轴E1.
IO区域 焊钳1从705开始 焊钳2从865开始, 焊钳3从1025开始.
铆钳1 从1185开始, 铆钳2 从1265 开始. 压铆钳1从 1345开始
压铆钳2 从1425开始.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28445浏览量
207203 -
接口
+关注
关注
33文章
8611浏览量
151234
原文标题:VASS05机器人2.20系统ProConOS_IO接口解析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更高效地应对复杂环境和多样化需求
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
感谢
感谢电子发烧友网社区给予《具身智能机器人系统》试读机会。在这知识的盛宴中,我感受到社区的关怀与支持。定不负期望,认真研读,分享所学,回馈社区。
一、本书大纲
《具身智能机器人系统
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
了解具身智能机器人相关的知识,我感到十分荣幸和幸运。
全书简介
本书以循序渐进的方式展开,通过对具身智能机器人技术的全方位解析,帮助读者系统化地学习这一领域的核心知识。
首先在第一部
发表于 12-27 14:50
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
提供了对机器人环境和动作的统一和详细的理解。只有在这些过程之后,数据才能有效地用于训练 EAI 系统。
目前,应用 Sim2Real 技术的主要障碍是“现实差距”,即模拟环境与现实世界之间的差异,包括物理
发表于 12-24 00:33
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
、谷歌的RT系列等前沿产品中展露锋芒。这些突破性成果标志着AI正从虚拟世界迈向物理世界的深度交互。
而研读《具身智能机器人系统》前六章,我对具身智能(Embodied Artificial
发表于 12-19 22:26
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
abb机器人的io通信和信号设置过程
引言 ABB机器人作为工业自动化领域的重要设备,其IO通信和信号设置是实现机器人与外部设备进行数据交换和控制的关键。本文将详细介绍ABB机器人的IO
机器人控制系统的基本单元有哪些
的自主控制。机器人控制系统的基本单元包括传感器、执行器、控制器、驱动器和通信接口等,这些单元相互协作,共同完成机器人的控制任务。 传感器 传感器是机
机器人舵机:关键要素解析与选择指南
在机器人技术日新月异的今天,舵机作为机器人的核心部件之一,扮演着至关重要的角色。它的性能直接关系到机器人的运动控制、稳定性以及精度等方面。那么,在选择和使用机器人舵机时,我们需要关注哪

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17





 工商网监
工商网监
评论