 KUKA机器人之PFO飞行焊控制
KUKA机器人之PFO飞行焊控制

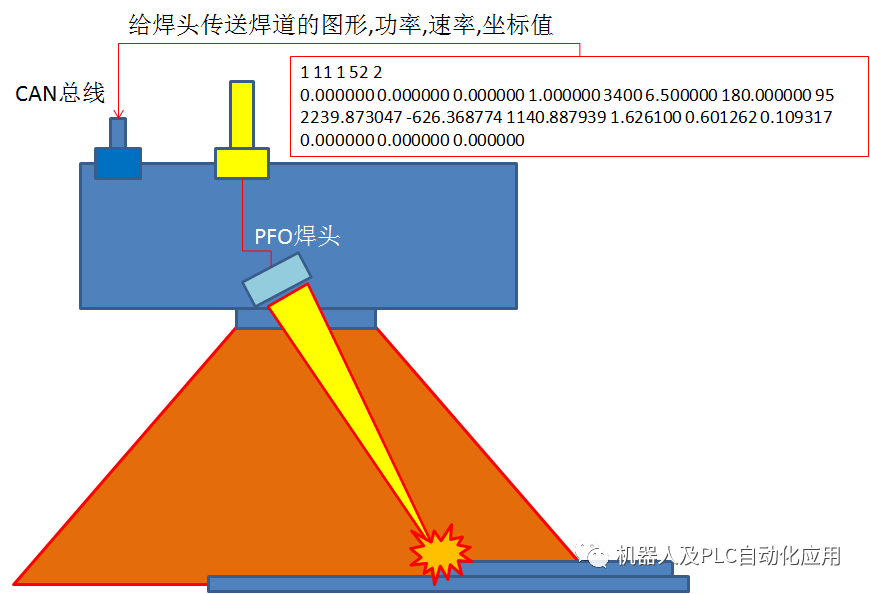
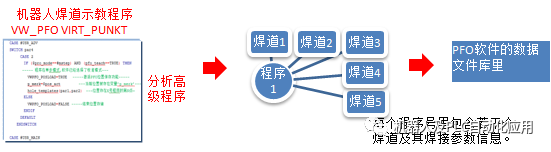
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
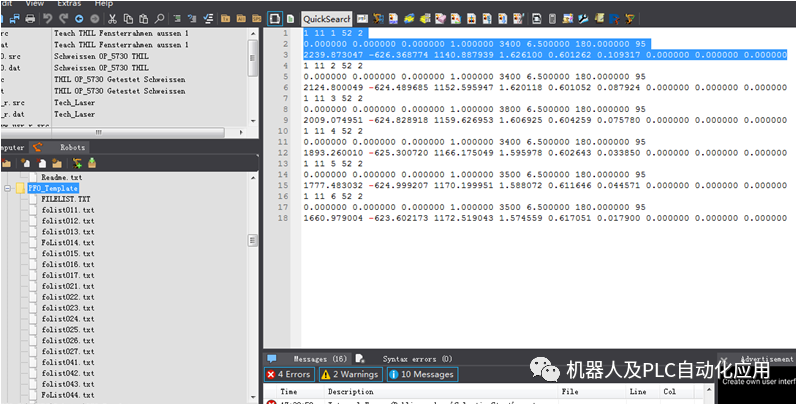


使用软件用来微调:

还有其他的焊道的模式用来校准
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28380浏览量
206918 -
KUKA
+关注
关注
3文章
217浏览量
16516
原文标题:KUKA机器人之PFO飞行焊控制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
搜索策略等规划算法,强调了轨迹规划需要考虑机器人的运动学约束。在轨迹规划中,机器人需要同时考虑最大曲率、加速度限制等物理约束,生成平滑可行的运动轨迹。强化学习在规划控制中的应用也很有创新性,通过智能体
发表于 12-19 22:26
【开源项目】你准备好DIY一款功能强大的机器人了吗?
以及3D打印机械部件。通过运动控制、蓝牙连接和可定制的眼部表情,让这款机器人活灵活现。
所需材料
电子元件:
Atmega328p微控制器(SMD VQFN版本)、L293电机驱动器(SMD
发表于 11-08 10:53
伺服控制机器人的控制方式有哪些
伺服控制机器人是一种高度精确的自动化设备,它能够执行复杂的任务,如精确定位、重复运动和力控制。伺服控制系统是机器人技术中的核心部分,它负责接
人形机器人控制器之MCU、DSP、AI芯片
电子发烧友网报道(文/李弯弯)人形机器人控制器是人形机器人中的核心神经系统,负责对机器人的运动进行细致规划和控制,是
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
如何使用PLC控制机器人
随着工业自动化技术的飞速发展,机器人技术作为其中的重要组成部分,其应用范围日益广泛。在机器人的控制系统中,PLC(Programmable Logic Controller,可编程逻辑控制
工业机器人仿真软件有哪些
功能强大的机器人仿真和离线编程软件,支持多种机器人品牌,如Fanuc、KUKA、ABB等。它提供了丰富的工具,如3D可视化、碰撞检测、路径优化等。 CoppeliaSim (前称V-REP) :CoppeliaSim 是一款开源
简述工业机器人控制系统的特点
工业机器人控制系统是工业机器人的核心组成部分,它负责接收输入信号、处理信息、控制机器人的运动和执行任务。随着工业自动化和智能制造的快速发展,
机器人控制系统的基本单元有哪些
引言 机器人是一种具有高度自动化和智能化的设备,它可以模拟人类的行为和思维,完成各种复杂的任务。机器人控制系统是机器人的重要组成部分,它负责接收传感器的信号,处理数据,

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
了使用体验,其发展前景愈发广阔。
1. 搭配无刷电机的扫地机器人之优势
无刷电机相较于传统有刷电机,具有更高的效率、更低的噪音和更长的使用寿命。这一技术的应用,使得扫地机器人能够在同等能耗下提供更强
发表于 05-05 15:03
华为气球飞行机器人专利公布 可提高安全性及续航等
华为技术有限公司申请的“飞行机器人”专利在近期已经公布。本申请提供一种包括气囊和围绕气囊设置的四个第一推进器的飞行机器人,第一推进器均连接气囊,每相邻的两个第一推进器为轴对称设置。





 工商网监
工商网监
评论