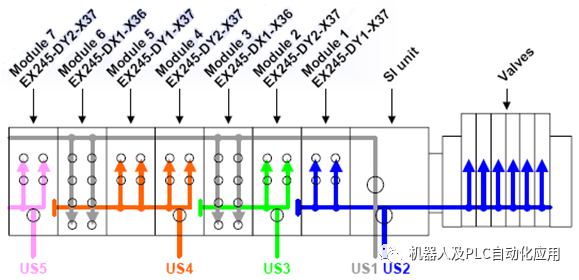
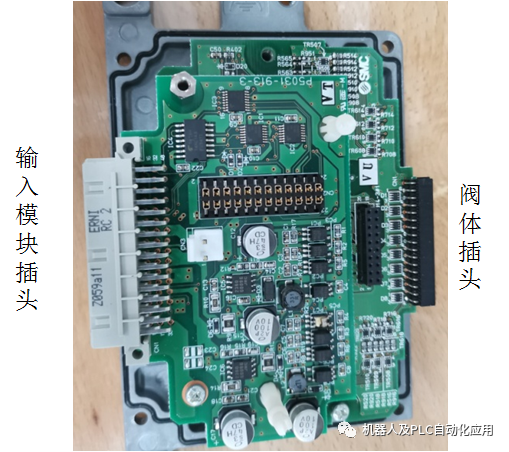
 机器人US2时阀导的输入模块无故障
机器人US2时阀导的输入模块无故障
1.给上使能后SF灯亮没有阀的输出 更换阀头

给上”使能”后US2电给供给,SF灯亮,通过机器人控制阀导无输出,阀部动作证明不是单纯的某一个阀损坏,更换阀头故障解决。
2.给上使能后输入信号全无
在机器人没有给上”使能”US2时阀导的输入模块无故障,显示正常。给上使能后输入模块的输入点都无电,相当于给输入模块断US1。更换阀头EX245模块。
US1电源供给故障存在故障
3.给上使能后输出阀组的第一位信号自动给入,SF灯亮。
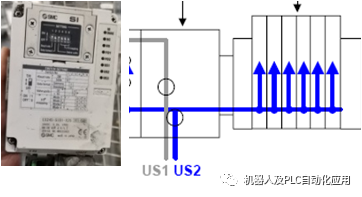
在机器人没有进行控制的时候,就有阀导的电,对其余阀进行控制不能控制,阀无动作。
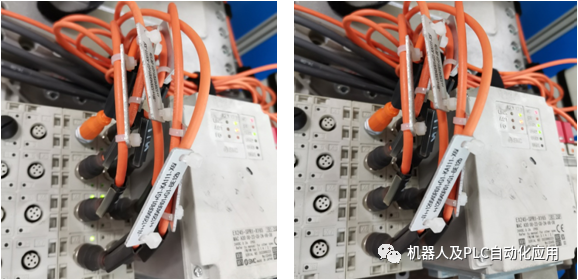
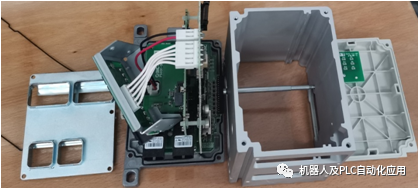
拆卸阀体测试

拆卸损坏的阀头

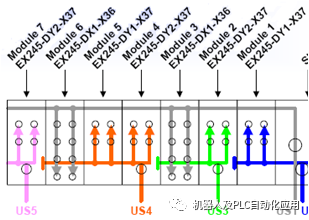
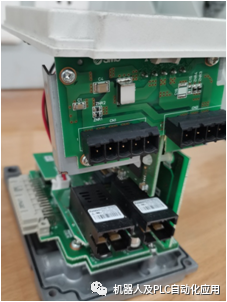
US电源分配板

电源分配板
拆解完毕
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电源
+关注
关注
184文章
17761浏览量
250653 -
机器人
+关注
关注
211文章
28476浏览量
207419 -
控制阀
+关注
关注
1文章
94浏览量
13826
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主
发表于 01-04 19:22
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
取特征点,涉及大量像素级比较运算;优化机器人位姿,需要迭代求解大规模矩阵方程。书中提出了模块化的硬件加速方案,阐述了如何以因子图为通用模版,以求解非线性优化问题为桥梁,面向多种机器人应用进行加速。
第11
发表于 01-04 01:15
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
客,Tillu都是进入激动人心的机器人世界的敲门砖。
让我们一起赋予Tillu生命,突破机器人技术的边界!
所需材料
1x Unihiker
4x 伺服电机
1x 电池管理模块
2x
发表于 01-02 17:24
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行提供更加全面的感知
发表于 12-29 23:04
翼菲并联机器人通过MTBF 20000小时认证
经过严格而全面的测试,翼菲并联机器人成功通过MTBF(平均无故障工作时间)20000小时认证,这一里程碑式的成就,不仅标志着翼菲机器人在可靠性方面达到了国际领先水平,更是国内并联机器人
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
焊接机器人常见故障及排查
的迹象。 检查紧固件: 确保所有紧固件都已正确拧紧,没有松动。 检查过载保护: 如果机器人有过载保护,检查是否因为过载而停止工作。 2. 电气故障 故障现象:
机器人维修思路是什么?
发那科(FANUC)机器人维修是一个复杂但系统的过程,涉及多个方面的检查和修复。以下是对发那科机器人维修的详细解析: 一、详细检查与定位故障 1. 驱动器检查: 检查驱动器是否正常工作,有无故
开源项目!用ESP32做一个可爱的无用机器人
/Kawaii-Useless-Robot
也可以“可爱的无用机器人”打包下载所有3D打印文件。
项目链接:https://www.instructables.com/Kawaii-Useless-Robot-2024-Edition/
项目作者:tobychui
*附件:可爱的无用
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,机器人启
发表于 08-30 14:50
FMEA在工业机器人故障预防中的应用
在工业自动化领域,FMEA(Failure Mode and Effects Analysis)不仅是一种分析方法,更是提升产品可靠性和安全性的关键工具。通过对工业机器人可能发生的各种故障模式进行
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
六轴焊接机器人的操作流程
灵活的操作性和较高的工作效率,今天跟随创想智控焊缝跟踪小编一起了解六轴焊接机器人的操作流程。 一、机器人准备 开机自检:启动机器人控制系统,进行自检程序,确保系统正常运行,无故障提示。

基于OpenVINO™的诺达佳机器人控制器实战
诺达佳机器人控制器,搭载英特尔处理器,以其强大的性能和稳定性,为AI机器人长期无故障运行提供了坚实的基础。






 工商网监
工商网监
评论