 分析服务器程序和机器人控制系统之间的数据交换
分析服务器程序和机器人控制系统之间的数据交换
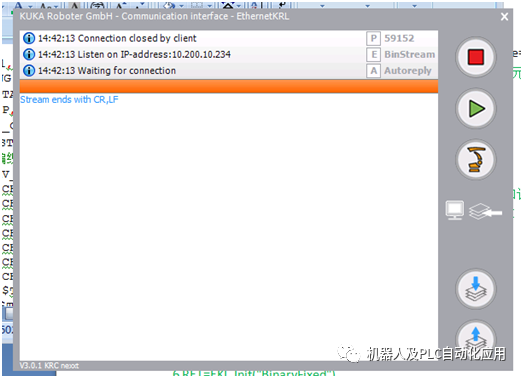
ETHERNETKRL用于视觉抓取和PC通讯的大数据量数据快速交换!采用报文形式连接,机器人使用XML文件进行连接。
1.信息提示窗口
2.显示所设置的通讯伙伴
P:端口编号
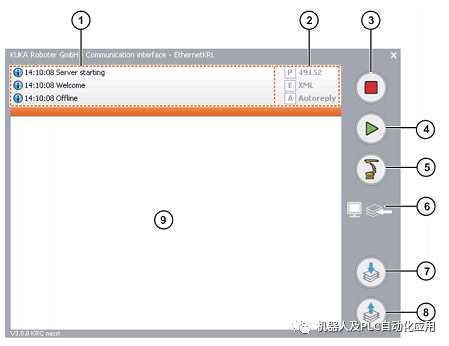
E: 示例数据
Xml :XML 数据
BinaryFixed :有固定长度的二进制数据
BinaryStream:带末尾字符串的可变二进制数据流
A:通讯模式
Autoreply :服务器自动回答每个接收的数据包。
Manual:仅手动接收数据或发送数据
3.停止按钮
结束与机器人控制系统的通讯并且重置服务器。
4. 开始按钮
分析服务器程序和机器人控制系统之间的数据交换。连接第一个到
达的连接请求并用作通讯适配器。
5. 用于设置通讯参数的菜单按钮
6. 显示选项
7. 手动接收数据的按钮
8. 手动发送数据的按钮
9. 显示窗口
根据所设置显示选项的不同,显示发送或接收的数据。
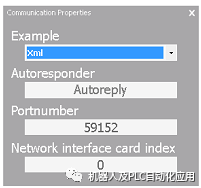
Example 选择示例数据。
Xml:XML 数据
BinaryFixed :有固定长度的二进制数据
BinaryStream:带末尾字符串的可变二进制数据流
默认值:xml
Autoresponder 选择通讯模式。
Autoreply :服务器自动回答每个已接收的数据包。
Manual:仅手动接收数据或发送数据
默认值:Autoreply
端口编号 输入插座连接的端口编号。
外部系统在该端口上等待机器人控制系统的连接请求。
必须选择一个没有作为标准服务占用的空号。
默认值:59152
提示:选择端口时,须注意不能有其他服务 (如操作系统)使用该端口。否则无法通过该端口建立连接。
Network interface card index 输入网络适配器编号。
只有当外部系统使用多个网卡 (如 WLAN 和 LAN)时才相关。
默认值:0 我的电脑用了1
实践测试C4 8.2系统连接服务器成功但是不能执行BinaryFixed( )程序,连接C4 8.3系统连接服务器成功,执行BinaryFixed( )程序成功。
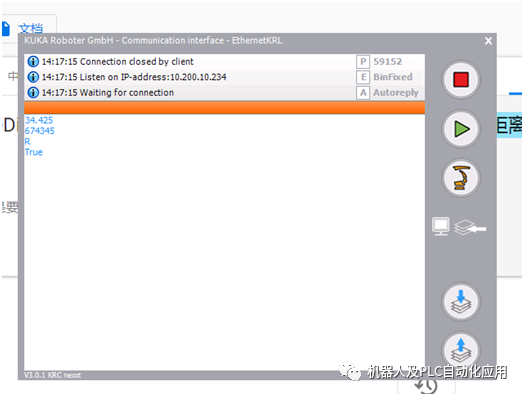
程序更改测试成功!
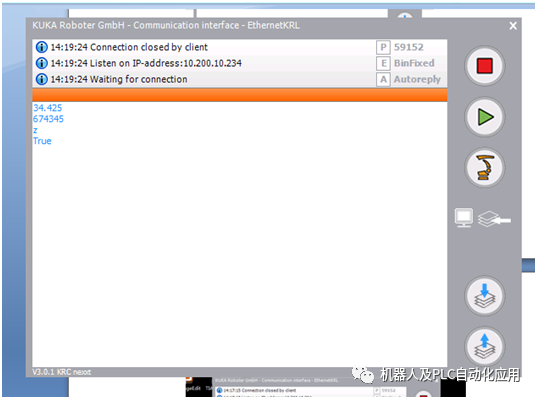
执行“BinaryStream”程序成功!
今天是技术突破的一天!哈哈有理论到实际,还是需要过程的。今后还会继续把学习ETHERNETKRL编程心得与大家进行分享.
责任编辑:pj
-
机器人
+关注
关注
211文章
28476浏览量
207419 -
服务器
+关注
关注
12文章
9219浏览量
85596 -
程序
+关注
关注
117文章
3790浏览量
81140
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ABB机器人的基本程序数据有哪些
简述工业机器人控制系统的特点
机器人控制系统的基本单元有哪些
工业机器人电气控制系统的体系结构主要有哪些
工业机器人控制系统的主要功能
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
浅谈海康机器人控制系统






 工商网监
工商网监
评论