 关于EtherCAT的性能
关于EtherCAT的性能
在平时应用时KUKA机器人,铆接设备,激光焊等设备大量使用了EtherCAT通讯,下面我们就来介绍一下它。
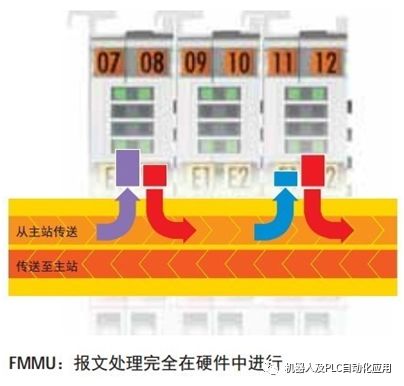
1.EtherCAT协议处理完全在硬件中进行
协议ASIC 可灵活配置。过程接口可从1 位扩展到64 kbyte。
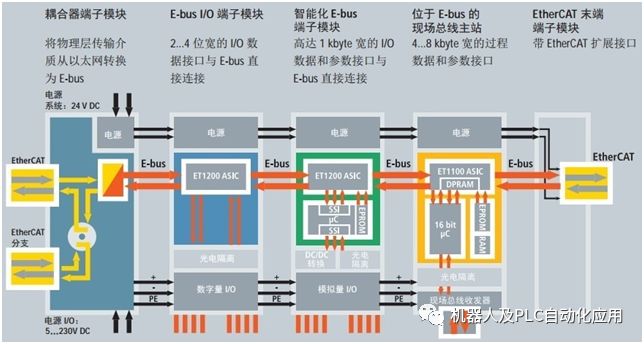
符合IEEE 802.3 标准的以太网协议无需附加任何总线即可访问各个设备。耦合设备中的物理层由100BASE-TX 或–FX 转换为E-bus,以满足电子端子排等模块化设备的需求。端子排内的E-bus 信号类型(LVDS)并不是专用的,它还可用于 10 Gbit 以太网。在端子排末端,物理总线特性被转换回100BASE-TX 标准。
主板集成的以太网MAC 足以作为主站设备中的硬件使用。DMA(直接存储器存取)用于将数据传输到主内存,解除了 CPU 存取网络数据的负担。Beckhoff 的多端口插卡中运用了相同的原理,它在一个PCI 插槽中最多捆绑了4 个以太网通道。
2. EtherCAT的性能
EtherCAT 使网络性能达到了一个新境界。
1000 个I/O 的更新时间只需30 µs,其中还包括I/O 周期时间。单个以太网帧最多可进行1486 字节的过程数据交换,几乎相当于12000 个数字输入和输出,而传送这些数据耗时仅为300 µs。
与100 个伺服轴的通讯每100 µs 执行一次。可在这一周期时间内更新带有命令值和控制数据的所有轴的实际位置及状态,分布式时钟技术使轴的同步偏差小于1 微秒。
超高性能的EtherCAT 技术可以实现传统的现场总线系统无法迄及的控制理念。
这样,通过总线也可以形成超高速控制回路。以前需要本地专用硬件支持的功能现在可在软件中加以映射。巨大的带宽资源使得状态数据能够与任何数据并行传输。EtherCAT 使通讯技术和现代工业PC 所具有的超强计算能力相适应,总线系统不再是控制理念的瓶颈,分布式I/O 可能比大多数本地I/O 接口运行速度更快。
这种网络性能优势在具有相对中等运算能力的小型控制器中较为明显。EtherCAT周期时间如此之短,使得它可以在两个控制周期之间完成。因此,控制器总是能够获取最新的输入数据;输出以最小的延迟寻址。无需增强本身的运算能力,控制器的响应行为就能够得到显著改善。
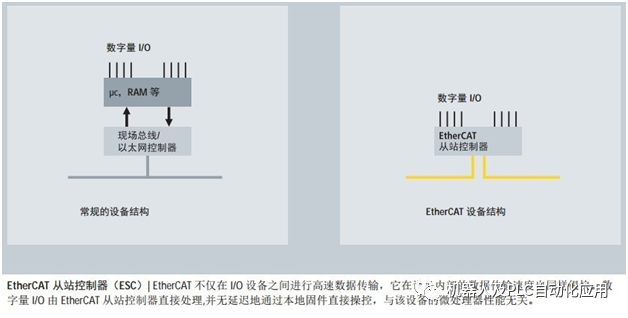
借助于从站硬件集成和网络控制器主站的直接内存存取,整个协议的处理过程都在硬件中得以实现,因此,完全独立于协议堆栈的实时运行系统、CPU 性能或软件实现方式。
1000个I/O的更新时间只需30 µs,其中还包括I/O周期时间。
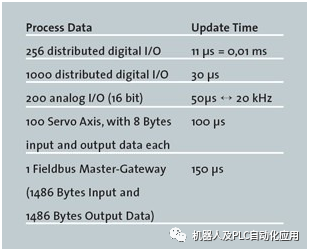
单个以太网帧最多可进行1486字节的过程数据交换,几乎相当于12000个数字输入和输出,而传送这些数据耗时仅为300 µs。
100个伺服轴的通讯也非常快速:可在每100µs中更新带有命令值和控制数据的所有轴的实际位置及状态,分布时钟技术使轴的同步偏差小于1微秒。而即使是在保证这种性能的情况下,带宽仍足以实现异步通讯,如TCP/IP、下载参数或上载诊断数据。
超高性能的EtherCAT技术可以实现传统的现场总线系统无法迄及的控制理念。EtherCAT使通讯技术和现代工业PC所具有的超强计算能力相适应,总线系统不再是控制理念的瓶颈,分布式I/O可能比大多数本地I/O接口运行速度更快。EtherCAT技术原理具有可塑性,并不束缚于100 M bps的通讯速率,甚至有可能扩展为1000M bps的以太网。
3. EtherCAT的拓扑
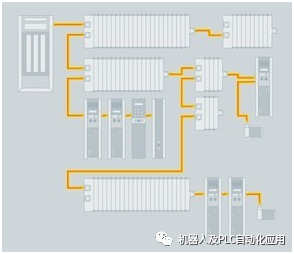
总线形、树形或星型:EtherCAT支持几乎任何类型的拓扑结构。
因此,由于现场总线而得名的总线结构或线型结构也可用于以太网,并且不受限于级联交换机或集线器的数量。
最有效的系统连线方法是对线型、分支或树叉结构进行拓扑组合。因为所需接口在I/O 模块等很多设备中都已存在,所以无需附加交换机。
当然,仍然可以使用传统的、基于以太网的星型拓扑结构。
还可以选择不同的电缆以提升连线的灵活性:灵活、经济的标准超五类以太网电缆可采用100BASE-TX 模式传送信号,两台设备之间的最大电缆长度为100 m。
还可通过交换机或介质转换器实现不同以太网连线(如不同的光纤和铜电缆)的完整组合。
信号变量可以根据每个电缆间距单独选择。由于连接的设备数量可高达65535,因此,网络的容量几乎没有限制。
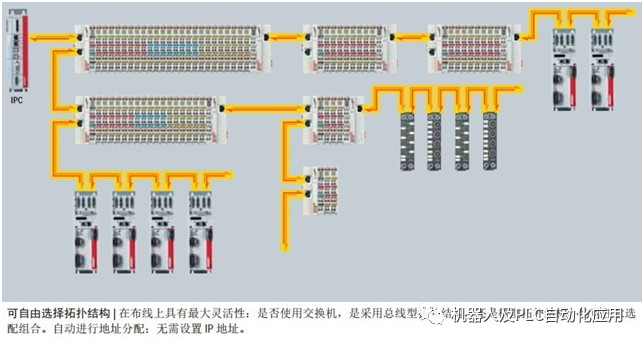
EtherCAT使用全双工的以太网实体层,从站可能有二个或二个以上的埠。若设备没侦测到其下游有其他设备,从站的控制器会自动关闭对应的埠并回传以太网帧。由于上述的特性,EtherCAT几乎支援所有的网络拓扑,包括总线式、树状或是星状,现场总线常用的总线式拓扑也可以用在以太网中。
EtherCAT的拓扑可以用网络线、分枝或是短线(stub)作任意的组合。有三个或三个以上以太网接口的设备就可以当作分接器,不一定一定要用网络交换器。由于使用100BASE-TX的以太网物理层,二个设备之间的距离可以到100米,一个EtherCAT区段的网络最多可以有65535个设备。若EtherCAT网络是使用环状拓扑(主站设备需要有二个通讯埠),则此网络还有缆线冗余的机能。
4. EtherCAT支持热连接
许多应用都需要在运行过程中改变I/O组态。例如,需求不断变化的加工中心、装备传感器的刀具系统或智能化的传输系统、灵活的工件执行机构或可单独关闭印刷单元的印刷机等。EtherCAT系统的协议结构中已经考虑到了这些需求:热连接功能可以将网络的各个部分连在一起或断开,或“飞速”进行重新组态,针对不断变化的组态提供灵活的响应能力。
5. EtherCAT的安全性:Safety over EtherCAT
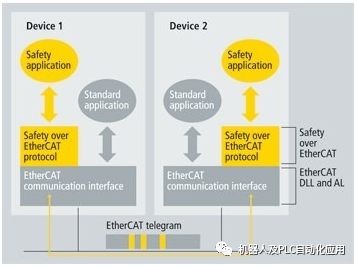
EtherCAT有一个加强的协定版本,称为Safety over EtherCAT,可以在同一个网络上进行安全相关的通讯和一般的控制通讯。此安全通讯是以EtherCAT的应用层为基础,不会影响底层的通讯协定。Safety over EtherCAT有通过IEC 61508的认证,符合安全完整性等级(SIL)3的要求。
为了实现EtherCAT 安全数据通讯,我们开放了Safetyover EtherCAT 协议,EtherCAT安全通信协议已经在ETG组织内部公开。该协议已经由德国技术监督局(TÜV)鉴定为符合IEC61508 定义的SIL3 等级要求。设备上实施EtherCAT安全协议必须满足安全目标的需求。相应的产品相关要求也必须考虑进来。
EtherCAT被用作传输安全和非安全数据的单一通道。传输介质被认为是“黑色通道”而不被包括在安全协议中。
EtherCAT过程数据中的安全数据报文包括安全过程数据和所要求的数据备份。这个“容器”在设备的应用层被安全地解析。通信仍然是单一通道的。这符合IEC61784-3附件中的模型A。因此,该安全协议也可通过其它通讯系统、背板或WLAN 传输。传输周期可根据要求缩短,不会影响残留误差率。Safety over EtherCAT 主站和从站之间的安全数据循环交换被称作为由看门狗定时器监控的连接。一个主站能建立并监控多个不同从站的连接。
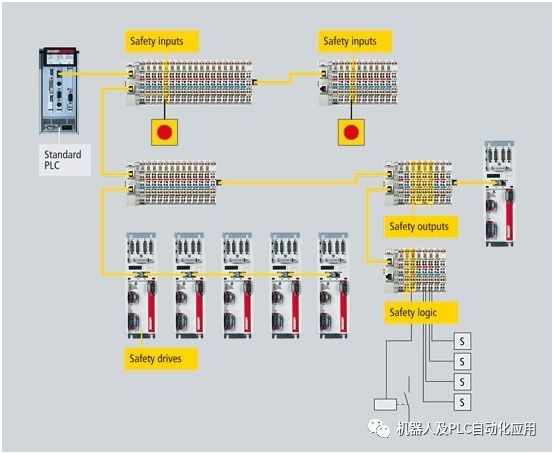
安全元件在自动化系统中所需要的任意地方都可以使用。系统中可以使用不同规模的本地输入和输出元件。可以根据需求使用安全或非安全总线端子扩展额外的输入和输出。安全逻辑也嵌入到网络当中。这样不用安全扩展的标准 PLC可以继续处理控制任务。安全输入和输出功能需要的本地安全逻辑由智能化的安全总线端子实现。这节约了昂贵的安全PLC所带来的成本,并可以根据当前任务随意裁剪逻辑功能。只有安全EtherCAT主站和所分配的安全从站通过非安全的标准PLC路由。
§ 本协议在安全数据长度,通信介质或波特率方面没有限制。
§ EtherCAT被用作“黑色通道”,即,通信系统在安全处理中没有任何作用。
§ 协议被鉴定符合IEC61508定义的SIL3等级
§ 提供EtherCAT安全功能的产品已经于2005年就上市了。
6. EtherCAT的诊断
现场总线系统的实际应用经验表明,有效性和试运行时间关键取决于诊断能力。只有快速而准确地检测出故障,并明确标明其所在位置,才能快速排除故障。因此,在EtherCAT的研发过程中,特别注重强化诊断特征。
网络的诊断能力对于提高网络可靠性和缩短调试时间 — 从而降低总成本 — 来说至关重要。只有快速而准确地检测出故障,并明确标明其所在位置,才能快速排除故障。因此,在EtherCAT 的研发过程中,特别注重强化诊断功能。
试运行期间,驱动或I/O 端子等节点的实际配置需要与指定的配置进行匹配性检查,拓扑结构也需要与配置相匹配。
由于整合的拓扑识别过程已延伸至各个端子,因此,这种检查不仅可以在系统启动期间进行,也可以在网络自动读取时进行(配置上载)。
数据传输过程中出现的位故障可以通过评估每台设备上的CRC 校验进行检测——32 位CRC多项式的最小汉明距为4。除断点检测和定位之外,EtherCAT系统的协议、物理层和拓扑结构还可以对各个传输段分别进行品质监视,与错误计数器关联的自动评估还可以对关键的网络段进行精确定位。此外,对于电磁干扰、连接器破损或电缆损坏等一些渐变或突变的错误源而言,即便它们尚未过度应变到网络自恢复能力的范围,也可对其进行检测与定位。
责任编辑:pj
-
机器人
+关注
关注
211文章
28418浏览量
207084 -
以太网
+关注
关注
40文章
5424浏览量
171702 -
plc
+关注
关注
5011文章
13297浏览量
463309
原文标题:TwinCAT/EtherCAT网络之详解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
EtherCAT主站协议栈性能测试:速度与效率的完美结合





 工商网监
工商网监
评论