 KUKAC4机器人电机风扇故障,使得机器人没有好使能.
KUKAC4机器人电机风扇故障,使得机器人没有好使能.
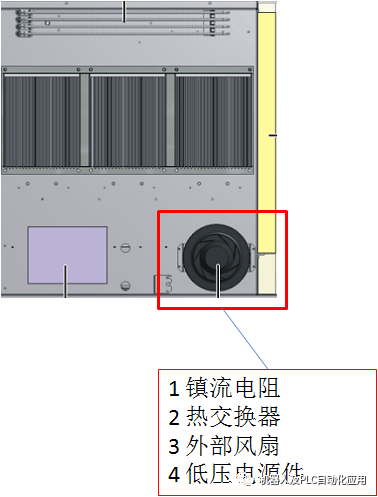
箱柜冷却系统说明:
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。在箱柜的外部区域,KPP 和 KPS 的低压电源件、镇流电阻和散热体则直接通过外部空气适当冷却。
外部风扇更换步骤
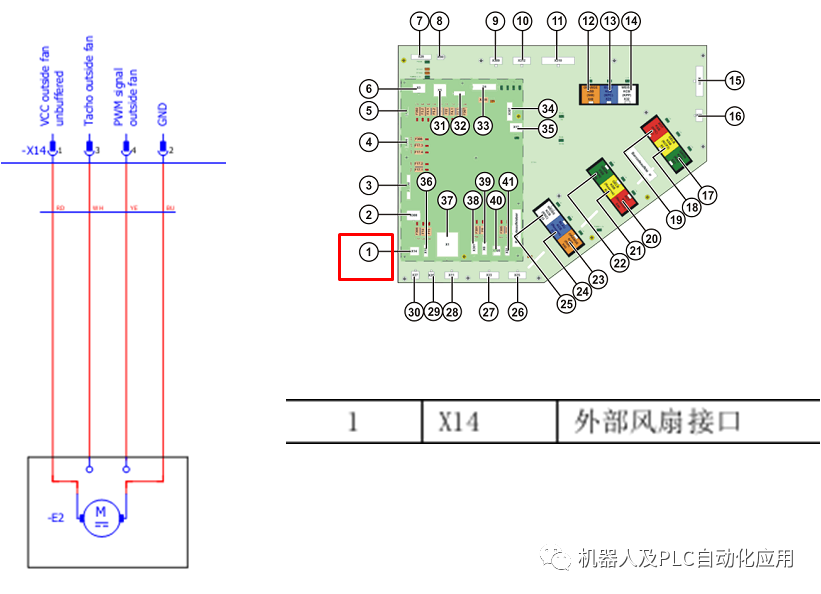
1. 从控制柜拔出风扇插头(2) X14。
2. 拧松四条螺丝(1) 并将背板拆出。
3. 将进线套筒的固定螺丝(1)拆出。
4. 将进线套筒(2)折回,然后拉出连接线。
5. 将风扇支架(1) 连同风扇一起取下。
6. 将新风扇连同支架一起装上并固定。
7. 将连接线引入箱柜内。
8. 装上进线套筒。
9. 装上背板,并将其固定
10. 将风扇插头X14 插到控制柜上。

20.F14 外部风扇7.5 A

KUKA 机器人报:"外部风扇转速低故障"
对电箱外部风扇进行清理,进行关机冷启动.故障消除
-
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208918 -
电机
+关注
关注
142文章
9101浏览量
146586 -
KUKA
+关注
关注
3文章
217浏览量
16630
原文标题:KUKAC4机器人电机风扇故障,使得机器人没有好使能.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伺服电动缸在人形机器人中的应用
将伺服电机自身优势转变成精确速度控制、精确位置控制和精确推力控制,从而实现高精度直线运动。这种特性使其成为人形机器人的核心运动部件,特别是在关节驱动方面。二、替代传统驱动方式在人形机器人中,伺服电动缸
发表于 02-06 09:04
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。机器人定位中的SLAM算法需要处理两个计算密集型任务:
发表于 01-04 01:15
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
客,Tillu都是进入激动人心的机器人世界的敲门砖。
让我们一起赋予Tillu生命,突破机器人技术的边界!
所需材料
1x Unihiker
4x 伺服电机
1x 电池管理模块
2x
发表于 01-02 17:24
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更高效地应对复杂环境和多样化需求
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
现状和前沿研究,详细介绍大模型的构建方法、训练数据、模型架构和优化技术。
第4部分(第10章到第13章)深入探讨提升机器人计算实时性、算法安全性、系统可靠性及具身智能数据挑战的具身智能机器人系统研究
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
提高机器人的自适应性和自主性,赋能机器人在多种场景中的应用。例如在家庭自动化领域,具身智能机器人能够感知家庭成员的日常习惯和需求,自动执行清洁、整理或其他家务任务。它们通过观察家庭成员
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
意味着在“具身智能”领域,还没有哪一个玩家能像O社那样能站在AGI的制高点。
具身智能从字面上拆解为“具身+智能”,指的是一种将机器学习算法适配至物理实体,从而与物理世界交互的AI范式
发表于 12-19 22:26
焊接机器人常见故障及排查
的迹象。 检查紧固件: 确保所有紧固件都已正确拧紧,没有松动。 检查过载保护: 如果机器人有过载保护,检查是否因为过载而停止工作。 2. 电气故障 故障现象:
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,在 PS层运行 苏姆的裸机程序, 并将六自由度串联机器人逆解算法移植到主站代码里,进行机器人末端位置对于视觉反馈的实时跟随控制。
(4)通过实验验证了本设计的对物块识别的准确性和实时性,并使用自主
发表于 05-29 16:17
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
了使用体验,其发展前景愈发广阔。
1. 搭配无刷电机的扫地机器人之优势
无刷电机相较于传统有刷电机,具有更高的效率、更低的噪音和更长的使用寿命。这一技术的应用,
发表于 05-05 15:03





 工商网监
工商网监
评论