 涂胶设备原理及KUKA机器人控制分析+MAKRO
涂胶设备原理及KUKA机器人控制分析+MAKRO
自动涂胶定量机简介:SCA定量机可以看作是杜尔涂胶得简装版,原理上是一样的但技术上杜尔要更加的复杂,SCA故障判断和控制比较简单,而杜尔涂胶需要对它的原理进行了解后维修和调试会更加的容易,由于杜尔涂胶是网络可视化,因此需要掌握的知识要更多一些。
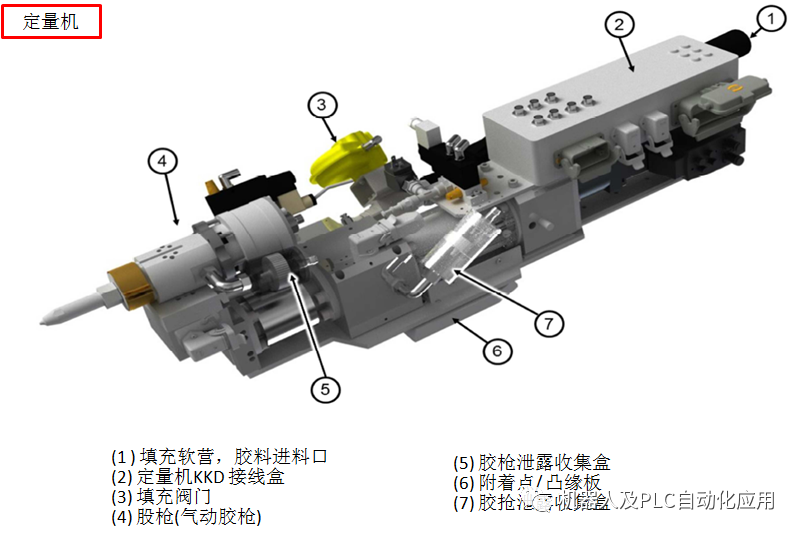
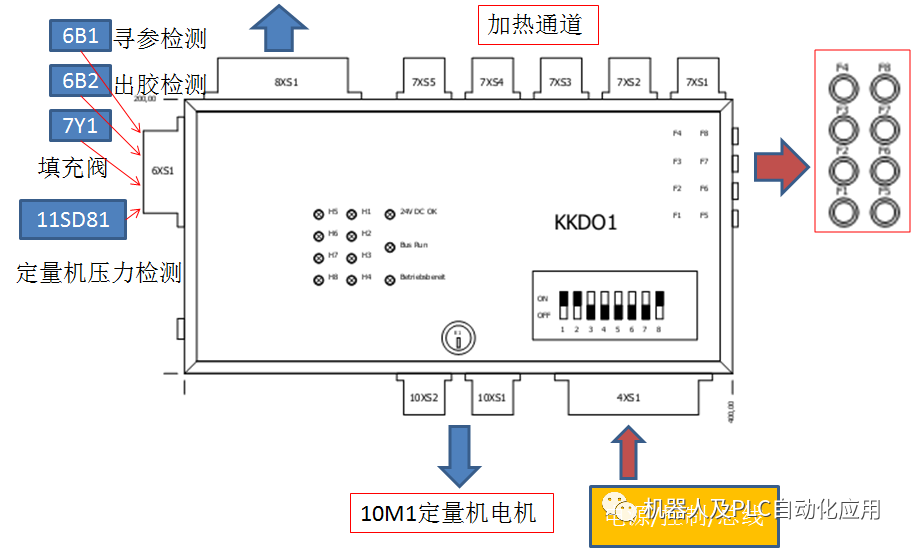
KKDD定量控制盒, 由于杜尔涂胶使用CAN总线因此在定量机的终端设备会采用终端电阻。
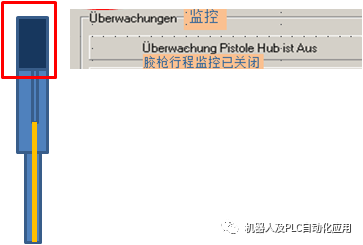
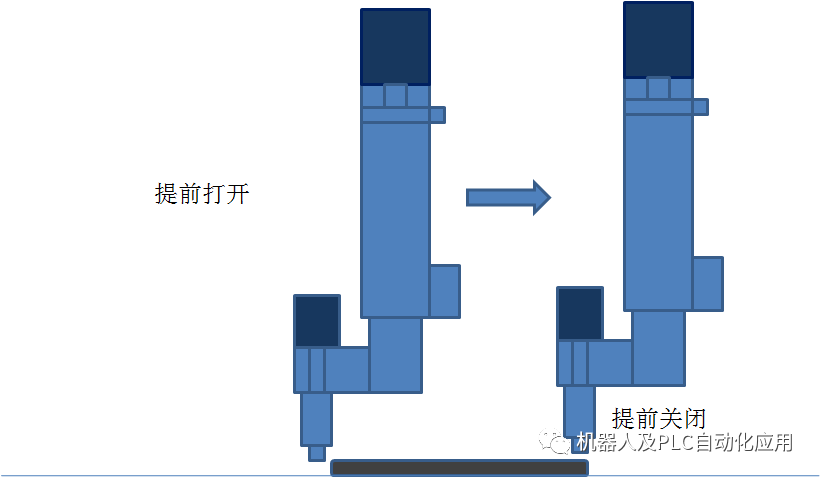
气动胶枪的行程可以监控:
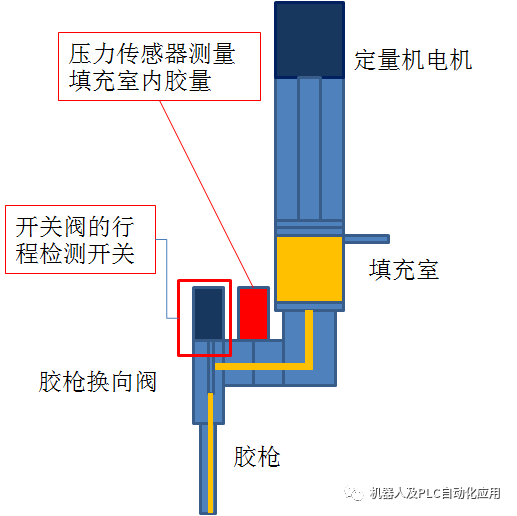
短珠电胶枪:

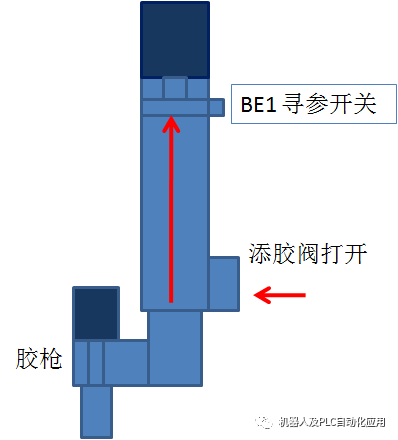
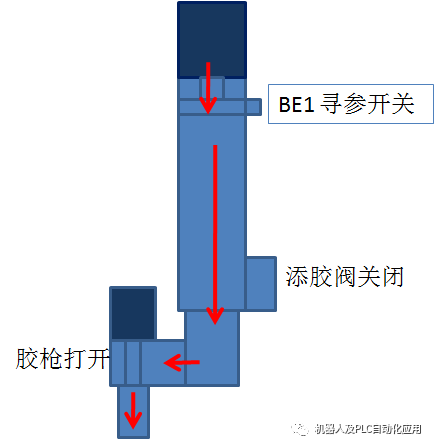
为什么定量机电机要寻参:
无论是DURR还是SCA的涂胶设备,他们在关机断电后都要进行自动寻参,这是因为他们的定量机电机使用了增量试编码器,所以在关机重启后定量机电机会沿着固定的方向去寻参!这时要有寻参前提:
1.胶枪位置确定关闭,如果是电胶枪,则应该是电胶枪先校准完,再校准定量机 .
2.电机在反转寻参时,由于处于填胶状态,需要填胶阀打开.
3.CAN线路网络无故障,
4.机器人使能
---涂胶设备在断电重启后会自动寻参,但是前提是胶枪的闭合(对于DURR这种高级的涂胶设备)
在涂胶定量机进行寻参的前提需要保证胶枪的位置是关闭的,气胶枪要好很多,一般不用寻参,电胶枪在设备断电启机会自动自动寻参,然后定量机再寻参.
电机胶枪之所以需要校正工具是因为,电机转子的转头需要有一个和胶枪嘴的正确安装位置,所以需要校正工具来清零,清零时电机不能得电旋转,清零后再校正电机。
喷射螺纹涂胶设备:
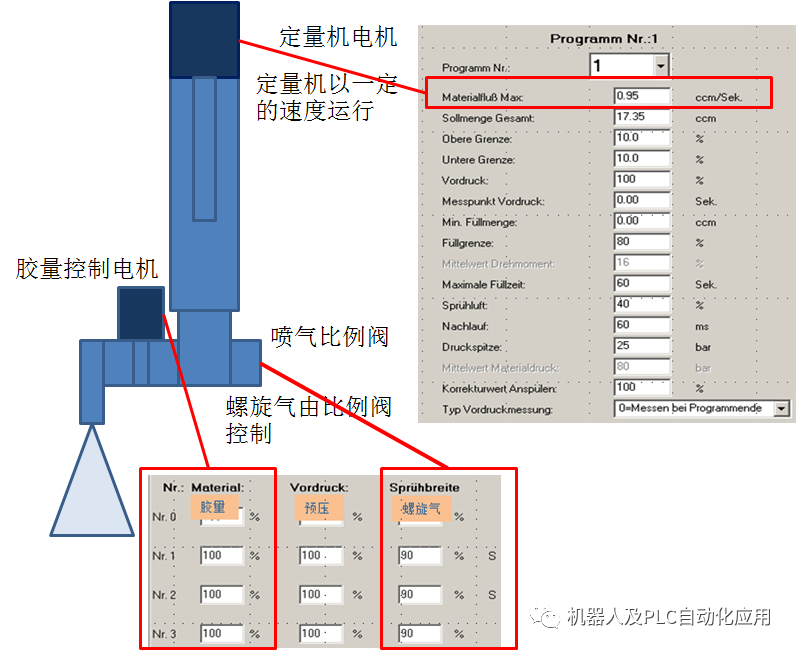
螺旋喷胶的结构:
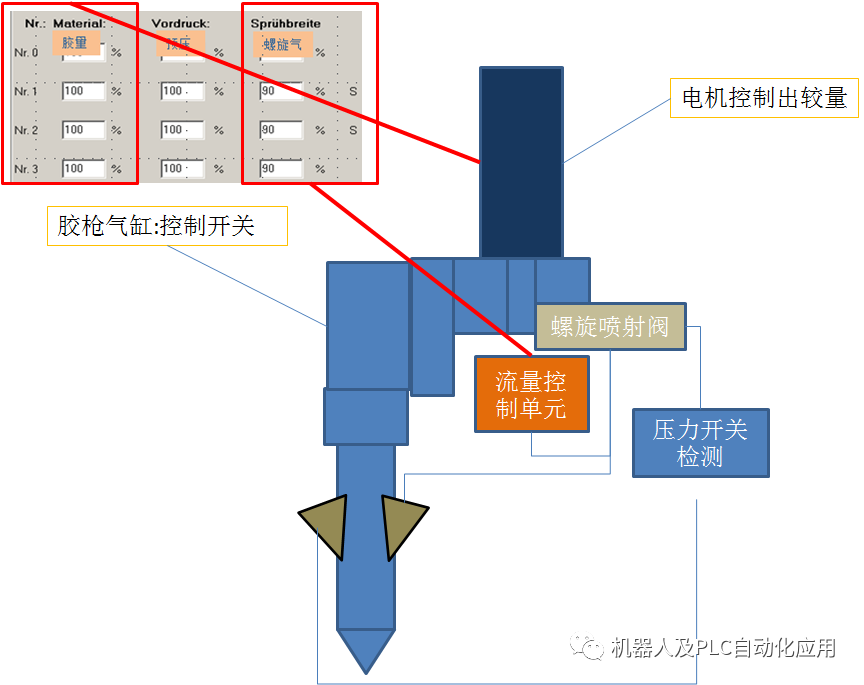

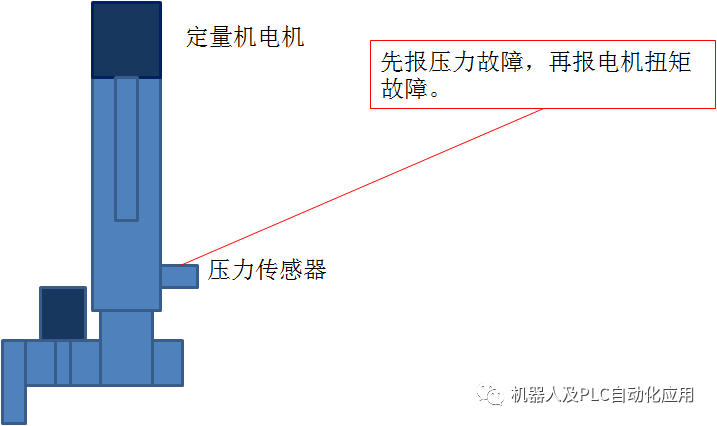
定量机的压力报警要先于定量机的扭矩报警:
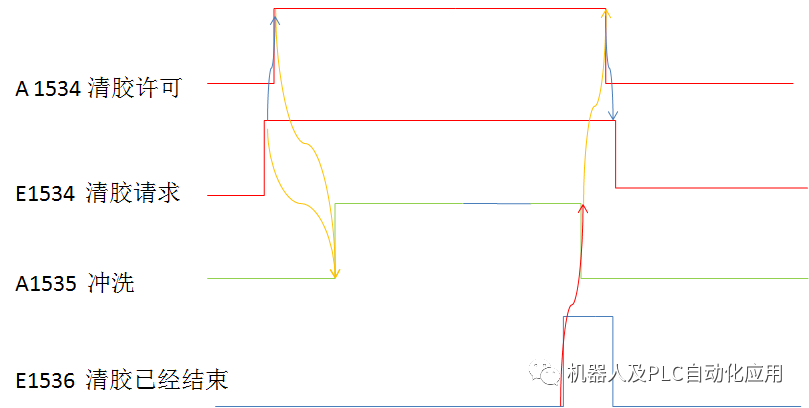
清胶控制时序:
清胶工作:
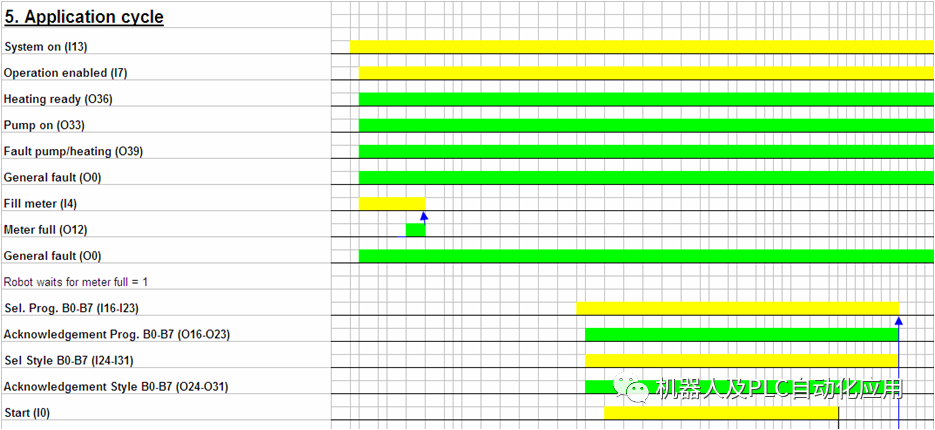
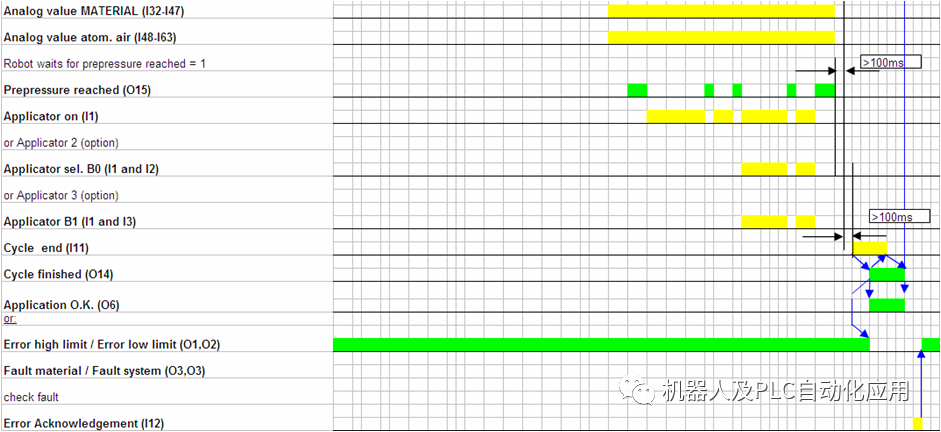
IO时序控制:
E1527准备就绪
A1529机器人开始控制涂胶设备-启动程序
A1530机器人模拟运行(不带工具)
E1532定量机1已加注 A1532更换定量机
E1533定量机2已加注 A1533触发预压
E1534清胶请求 A 1534清胶许可
E1535 清胶正在运行 A1535冲洗
E1536清胶已经结束
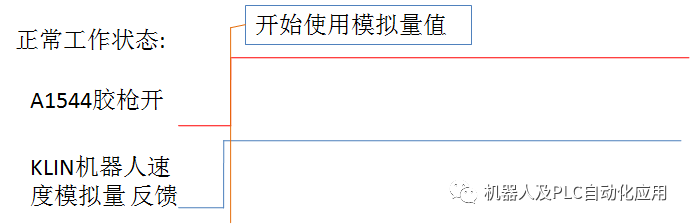
A1544胶枪打开
E1545系统为开启状态 A1545系统部件启动
控制时序:
进行涂胶工作:
先给入模拟量控制:
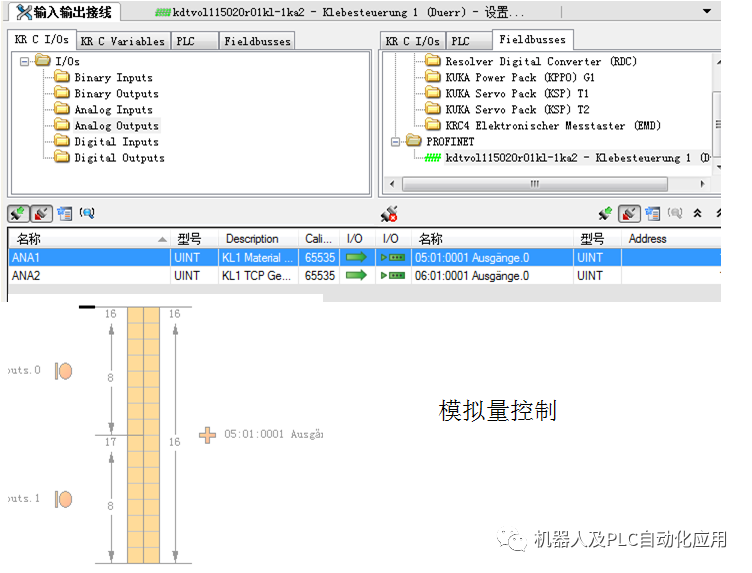
ana1 ( EIN ) =VPROP: 312 [mm/Sek] OFFS:0[mV]-胶量控制最多10V的机器人速度比
ana2 ( EIN ) =VPROP: 500 [mm/Sek] OFFS:0[mV]-喷气量的控制最多10V的机器人速度比
bin10 ( EIN )-涂胶的程序号
bin11 ( EIN )-涂胶程序号里的段号
F523:用于带摆臂胶桶控制阀带先导阀
F524:用于带摆臂胶桶控制阀不带先导阀
机器人的KLIN速度与ANA模拟设定的速度比为80%为最佳。
例如VPROP: 250机器人的速度是200。
如果电压下降并低于涂胶控制器参数的最小模拟量电压,会产生报警”机器人模拟值过低” 并引起程序中断
在路经程序中,确保每个编程的空间点不要太近,否则开关点将不清晰,此外,还会导致机器人不能达到它所设定的速度
涂胶条应用时,胶嘴与工件之间的距离与胶条的直径相近
在螺旋涂胶时,胶嘴和工件之间的距离要在30-40mm之间

模拟量故障:在胶枪打开后不能检测到模拟量数值因此报错
模拟量与机器人速度程序控制原理解析:
ana1 ( EIN ) =VPROP: 312 [mm/Sek] OFFS:0[mV]
VW(#ANAOUT,TRUE,2,1,312,0)
ANAOUT(MODE:IN,IFC_NO:IN,FACTOR:IN,OFFSET:IN)
- FACTOR=312模拟量的值
- MODE=2所用模拟量的类型算法
- IFC_NO=1模拟量的号
- OFFSET=0模拟量的补偿基值
- $VEL_ACT当前机器人的轨迹速度
SWITCH MODE
CASE1 -直接发出给入模拟量的值
IFIFC_NO==1THEN
ANOUT OFFANA1-关闭动态模拟量值-
ENDIF
.........
$ANOUT[IFC_NO]=FACTOR*1E-04-发出给入的模拟量的数值,=312*1e-04
CASE2-模拟量与速度相关联
SWITCH IFC_NO
CASE1
OFS1=OFFSET*1E-04
IFFACTOR==0THEN-标准值的算法
FACTOR=2E+06
ENDIF
FAC1=1000/FACTOR-正常输入值得算法FACTOR=312
-按照标准格式发出的模拟量输出-
ANOUT ON ANA1=$VEL_ACT*FAC1+OFS1-打开模拟量机器人当前速度的又有关的算法,加上基数
DELAY=ANA_DELAY1是否推迟或提前发出模拟量
MINIMUM=-1最大值最小值设置-1.0至+1.0(相当于-10 V至+10 V)。
MAXIMUM=1
.....
CASE3通过传感器轨迹纠正轨迹动作
FAC1=OFFSET*1E-04固定值
OFS1=FACTOR*1E-04
SWITCH IFC_NO
CASE1
ANOUT ON ANA1=FAC1*$TECHVAL[3]+OFS1-根据变量的测量值发出的模拟量
......
CASE4-固定变量值
IFFACTOR==0THEN
V_PROP=2E+06
ELSE
V_PROP=1000.0/FACTOR
ENDIF
ENDSWITCH
-----------------------
KLIN VB=250[mm/s] Genau=50[mm] ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
BS A1544 ( EIN ) =!E15 Schaltpkt:0[mm]:-25[ms]-胶枪打开
-当胶枪打开时,涂胶控制器开始接收机器人发出的模拟量,并根据模拟量值得大小控制定量机输出胶量进行改变.
-1.为什么不用PTP而用直线KLIN呢?应为PTP是点与点最近距离在移动过程中的速度不稳定的,所以模拟量的发出会时断时高,PTP的VB=100%的速度值与直线设定的速度是不同的.
-2. KLIN VB=250[mm/s]与ana1 ( EIN ) = VPROP: 312 [mm/Sek]的关系?
-直线距离的速度是250也就是$VEL_ACT=250而312是FAC1=1000/312
-公式: ANA1=$VEL_ACT*FAC1+OFS1;250*1000/312+0
-也就是说当VB=312[mm/s]时模拟的输出是最大的100%输出
---------------------------------
MAKRO50:
M30 = E14 & E24-机械安全+介质OK
M146 = E1529 + E15–KL1涂胶预压力建立
M148 = E1593 + E15–KL2涂胶预压力建立
-----------------------------------
MAKRO57:
F556 = EIN-短接E3846给PLC发出A27机器人主网OK
F522 = EIN-开启节能模式
F542 = EIN-涂胶KL1 -MIT_Kleben_1=TRUE激活URS_S里的涂胶功能
F336 = AUS-F_o_KL1_Trig=336- 激活反馈给PLC报警功能(温度和胶泵)
IF $FLAG[F_o_KL1_Trig] THEN
KL1_o_Nachtrig=TRUE
ELSE
KL1_o_Nachtrig=FALSE
ENDIF
F341 = EIN–没有使用
F346 = !E15 -F_m_KL1_SPUE=346在原位时才能清胶,空运转的时候不清胶.
IF MIT_KL1_SPUELEN OR$IN[I_KL1_anw_Sp] THEN 有F346或有E163 有
IF ($EXT==TRUE) AND $COULD_START_MOTIONAND $OUT[O_KL1_FRG_SP] THEN
-外部自动-监控开始接通-A1534请求清胶
IF $IN[I_KL1_ANF_SP] OR$IN[I_KL1_anw_Sp] THEN
-E1534请求清胶-E163PLC请求清胶
$OUT[O_KL1_SP_EIN]=TRUE –A1535清胶
$OUT[O_KL1_Sp_akt]=TRUE –A163给PLC发出机器人正在清胶
KL1_SPUELEN_AKTIV=TRUE
-激活F346后机器人不能再离开A15机器人原位,离开就关闭清胶-
F348 = AUS -控制是否激活A1540可以修复请求/ A1542测量启动
–AUS 不带自动恢复重涂
F350 = AUS -机器人控制添胶
F356 = AUS–固态胶枪-
IF $FLAG[F_m_KL1_stat] THEN
KL1_stat=TRUE选择固态胶枪
ELSE
KL1_stat=FALSE
ENDIF
F721 = !E15-机器人在零点位置时清胶
-------------------------------------------
AKROSPS()
A1527 = A10 -A10:RK100机器人接通-A1527涂胶准备请求-
A1528 = A12 –A12:机器人自动-A1528机器人控制涂胶自动-
F338 = !E1551 & A10 -E1551加热合格-F338 机器人驱动接通但没有加热-
F339 = (A1529 + A1535 + E9 & !E15 & !F336) & F338
-F339涂胶设备开始工作-A1529涂胶进程启动- A1535开始清胶-
A1547 = (F339 & !T20 + F337 + E168 + E9) & F542
- A1547泵复位-涂胶设备开始工作就复位泵-F542带涂胶设备
A1550 = (F339 & !T20 + F337 + E168 + E9) & F542& !E15
- A1550加热复位-涂胶设备开始工作就复位加热-E168PLC控制
-E168,-涂胶是从 E161开始
-FB252中
xS_HzNt := (bVisuTasten = Byte#11) -开启加热-
R_TRIG_xS_HzNt (CLK := xS_HzNt)
IF NOT(TP_EngspM_Ein.Q OR TP_EngspM_Aus.Q) THEN
IF R_TRIG_xS_EngspM.QAND xEngspM_Ein OR R_TRIG_EngspM_Aus.Q OR R_TRIG_xS_HzNt.Q THEN
-xEngspM_Ein-节能模式- R_TRIG_xS_EngspM-点一下开启节能模式再点一下就关闭节能模式 -
xEMode_Aus := True; -节能模式关闭-再按一次节能模式也能起到加人的作用
ELSIF R_TRIG_xS_EngspM.Q AND NOTxEngspM_Ein OR R_TRIG_EngspM_Ein.Q THEN
xEMode_Ein := True;
END_IF;
END_IF;
TP_EngspM_Aus(IN:= xEMode_Aus, PT := T#1.5s);-延迟1.5秒发出
ST_ROB.E129_224_Option[iK_Adress1]:= ST_ROB.E129_224_Option[iK_Adress1] ORSHL(IN:=BOOL_TO_BYTE(TP_EngspM_Aus.Q),N:=7) –关闭节能模式开启加热-
-E168被发出,各种关闭节能模式都能够能发出
------------------------------------------------
MAKRO180 –涂胶开始控制-
WARTEBIS E23 安全门请求进入等待
A161 = EIN
t12 ( E15 ) = p18[1/10Sek]
WARTE BIS T12 + !E15
GOTO Label 1 = E15 -用于空运转跳步-
初始化
A1531 = AUS
A1535 = AUS
1539 = AUS
A1541 = AUS
A1543 = AUS
F337 = EIN -泵和加热复位同时关闭节能模式
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS E1524 & E1525 &E1526 & E1527 & E1528 & !E1546 & E1550 + T10
-E1524没有涂胶故障-E1525没有定量机故障-E1526没有涂胶设备故障-E1527涂胶设备准备
-E1528涂胶设备在自动-E1546节能模式启动-E1550加热开
F347 = T10
WARTE BIS E1524 & E1525 &E1526 & E1527 & E1528 & !E1546 & E1550
F347 = AUS
t10 ( EIN ) = -600[1/10Sek]
WARTE BIS E1532 & !F350 + F350 +T10
-E1532:定量机1填满 - F350没有使用
F347 = T10
WARTE BIS E1532 & !F350 + F350 –F350控制自动填胶-
F347 = AUS
A1531 = E1531 & F350 –A1531自动填胶-胶不满发F350可自动填胶-
WARTE BIS !E1524 + !E1531 + !F350
-E1524没有故障-E1531 请求填满 -F350机器人控制填胶
F347 = !E1524 -没有涂胶准备-
WARTE BIS !E1531 + !F350
F347 = AUS
A1531 = AUS
t10 ( EIN ) = -5[1/10Sek]
WARTE BIS !E1530 & !E161 &!F525 + E1530 & (E161 + F525) + T10
-E1530反馈是否无工件运行-E161 不带涂胶工具-F525没有使用-
F347 = T10
WARTE BIS !E1530 & !E161 &!F525 + E1530 & (E161 + F525)
F347 = AUS
F337 = AUS
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS A1505 & E1505 + !A1505& !E1505 + T10
WARTE BIS A1506 & E1506 + !A1506& !E1506 + T10
WARTE BIS A1507 & E1507 + !A1507& !E1507 + T10
WARTE BIS A1508 & E1508 + !A1508& !E1508 + T10
WARTE BIS A1509 & E1509 + !A1509& !E1509 + T10
WARTE BIS A1510 & E1510 + !A1510& !E1510 + T10
WARTE BIS A1511 & E1511 + !A1511& !E1511 + T10
WARTE BIS A1512 & E1512 + !A1512& !E1512 + T10 -程序号反馈
WARTE BIS A1505 + A1506 + A1507 +A1508 + A1509 + A1510 + A1511 + A1512 + T10
F347 = T10
WARTE BIS A1505 & E1505 + !A1505& !E1505
WARTE BIS A1506 & E1506 + !A1506& !E1506
WARTE BIS A1507 & E1507 + !A1507& !E1507
WARTE BIS A1508 & E1508 + !A1508& !E1508
WARTE BIS A1509 & E1509 + !A1509& !E1509
WARTE BIS A1510 & E1510 + !A1510& !E1510
WARTE BIS A1511 & E1511 + !A1511& !E1511
WARTE BIS A1512 & E1512 + !A1512& !E1512
WARTE BIS A1505 + A1506 + A1507 + A1508 + A1509 + A1510 + A1511 + A1512
-有程序号发出-
F347 = AUS
t10 ( EIN ) = -20[1/10Sek]
-- KL1 Ueberpruefung Parametertafel --
WARTE BIS A1513 & E1513 + !A1513 & !E1513 + T10
WARTE BIS A1514 & E1514 + !A1514 & !E1514 + T10
WARTE BIS A1515 & E1515 + !A1515& !E1515 + T10
WARTE BIS A1516 & E1516 + !A1516& !E1516 + T10
WARTE BIS A1517 & E1517 + !A1517& !E1517 + T10
WARTE BIS A1518 & E1518 + !A1518& !E1518 + T10
WARTE BIS A1519 & E1519 + !A1519& !E1519 + T10
WARTE BIS A1520 & E1520 + !A1520& !E1520 + T10
WARTE BIS A1513 + A1514 + A1515 + A1516 + A1517 + A1518 + A1519 + A1520 +T10
WARTE BIS F980 + T10 等待机器人速度100%
F347 = T1
WARTE BIS A1513 & E1513 + !A1513& !E1513
WARTE BIS A1514 & E1514 + !A1514& !E1514
WARTE BIS A1515 & E1515 + !A1515& !E1515
WARTE BIS A1516 & E1516 + !A1516& !E1516
WARTE BIS A1517 & E1517 + !A1517& !E1517
WARTE BIS A1518 & E1518 + !A1518& !E1518
WARTE BIS A1519 & E1519 + !A1519& !E1519
WARTE BIS A1520 & E1520 + !A1520& !E1520
WARTE BIS A1513 + A1514 + A1515 + A1516 + A1517 + A1518 + A1519 + A1520
-程序段数有发出-
WARTE BIS F980 -F_OV_100=980- 机器人速度100%检查-
IF ($OV_PRO == 100) THEN –机器人速度100%时发出F980
$FLAG[F_OV_100]=TRUE
$OUT[O_R_n_OV]=FALSE -A28机器人不是100%速度
F347 = AUS
WARTE BIS E1551 -等待加热合格
t10 ( EIN ) = -5[1/10Sek]
WARTE BIS !E1529 + T10
F347 = T10
WARTE BIS !E1529 -E1529检测预压力没有到达
F347 = AUS
A1529 = EIN -涂胶控制开始—没有故障就建立预压-泵启动-加热开
t10 ( EIN ) = -60[1/10Sek]
WARTE BIS E1524 & E1528 &E1529 & !E1543 & E1526 + T10
F347 = T10
WARTE BIS E1524 & E1528 &E1529 & !E1543 & E1526
-E1543涂胶测量结束-在自动状态下没有故障,没有胶量故障
F347 = AUS
Label 1
----------------------------------------
MAKRO181 -涂胶结束控制
DEFFCTINT MAKRO181(ADV :IN)
A161 = EIN
t12 ( E15 ) = p15[1/10Sek]
WARTE BIS T12 + !E15
GOTO Label 1 = E15 -空运转不执行程序内功能
F342 = AUS
F343 = AUS
A1529 = AUS -关闭机器人的控制-关闭预压
t10 ( EIN ) = -5[1/10Sek]
WARTE BIS !E1543 + T10 –等待没有E1543测量结束
F347 = T10
WARTE BIS !E1543
F347 = AUS
A1543 = EIN -机器人控制涂胶设备涂胶测量可以结束
A1540 = AUS -请求重新涂胶
A1542 = AUS -测量开始
t10 ( EIN ) = -20[1/10Sek]
WARTE BIS E1543 + T10 –等待涂胶设备反馈测量结束
F347 = T10
WARTE BIS E1543 + E27 -E27跳过没有测量结束故障
F347 = AUS
A1543 = AUS
F347 = !E1524 + !E1525 + !E1526 -有故障
F343 = !E1526 –有涂胶故障
A161 = AUS
bin11 ( EIN ) = 1 -给涂胶设备程序段
F351 = E1531 & F350 & !F347 -E1531填胶请求-F351控制填胶
-由于F350没有使用,填胶由涂胶设备自己控制
Puls A1531 = Pegel5[1/10Sek]
Label 1
A1540 = AUS
A1542 = AUS
A161 = AUS
-----------------------------------------------------
-
总线
+关注
关注
10文章
2910浏览量
88535 -
可视化
+关注
关注
1文章
1204浏览量
21089 -
KUKA机器人
+关注
关注
4文章
143浏览量
9215
原文标题:涂胶设备原理及KUKA机器人控制分析+MAKRO
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
构建语音控制机器人 - 线性模型和机器学习

认识机器人与CW32四足机器人控制项目
MT6501磁编IC在涂胶机器人领域应用

Al大模型机器人
如何使用PLC控制机器人
工业机器人仿真软件有哪些
机器人控制系统的基本单元有哪些

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
KUKA机器人8.7系统对PROFINET软件进行编程控制的步骤






 工商网监
工商网监
评论