 FESTO气伺服焊钳气管接错后故障分析
FESTO气伺服焊钳气管接错后故障分析
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象.在作机器人E1轴移动时报拉拽故障.下面让我们分析一下气路.
伺服焊的第七轴(MQB)随动:
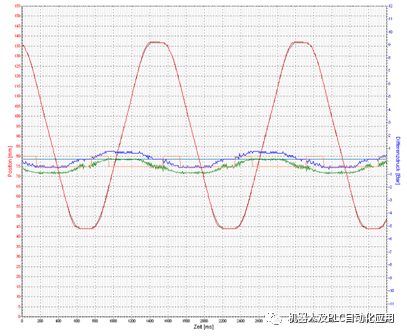
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程.
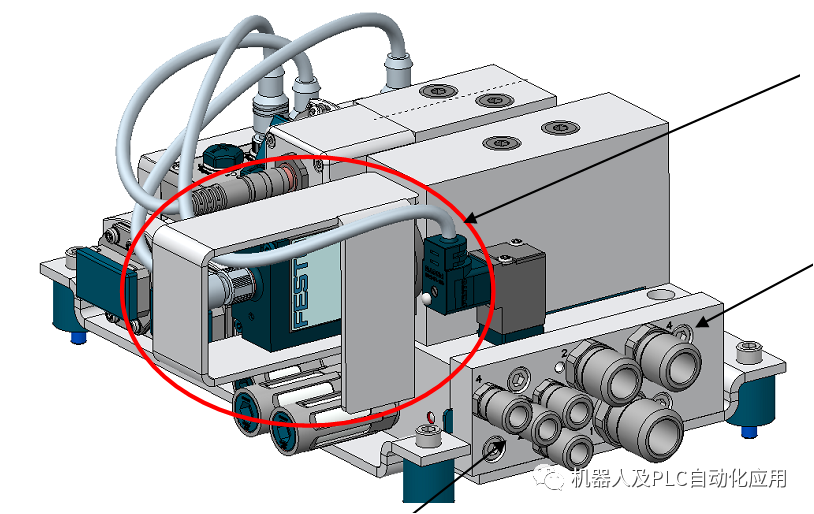
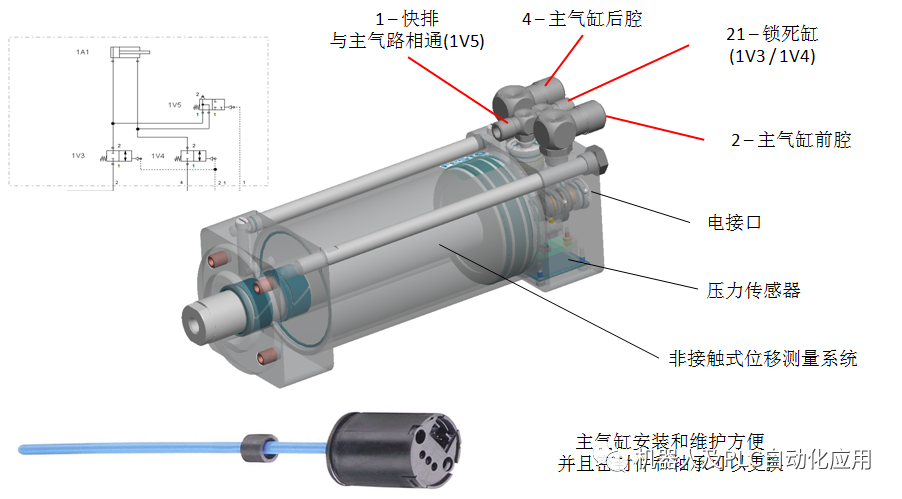
(FESTO伺服焊钳控制器)
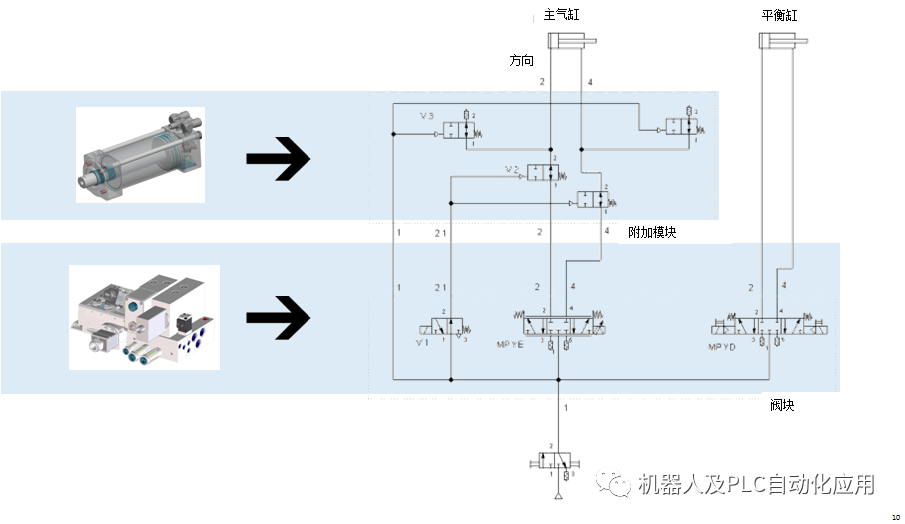
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
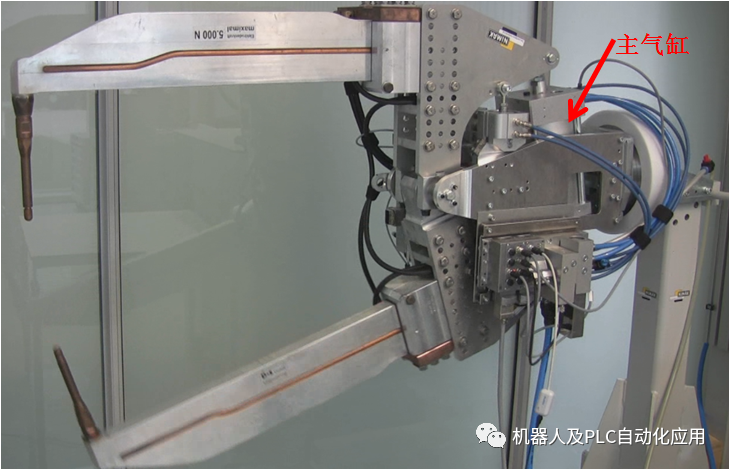
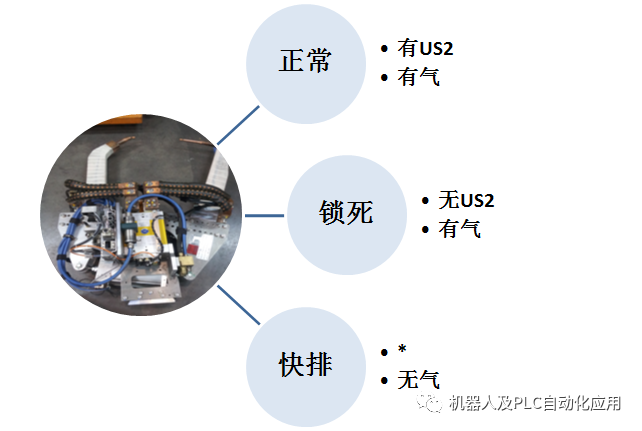
主气缸(C50)气管连接说明图:
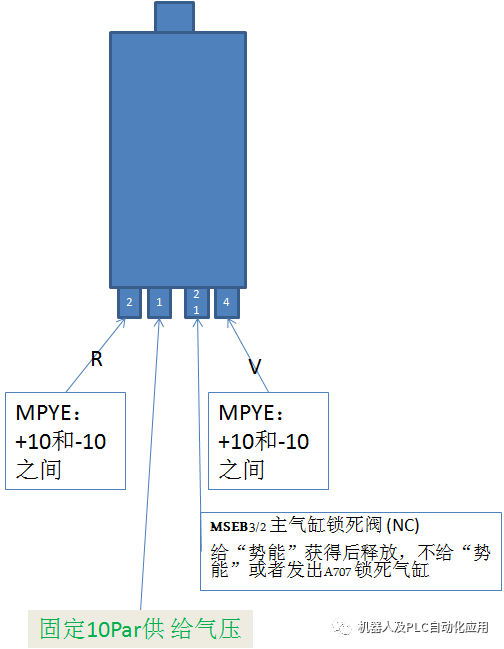
MSEB:控制锁死阀,给主气缸21的解锁压力不大
注意:阀座出气口的标号1/21是接到主气缸上的1/21的.
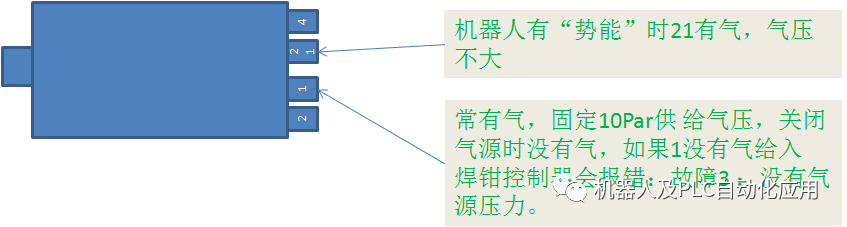
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制).
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力.
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障.
1.检查气源供给。检查气管连接。
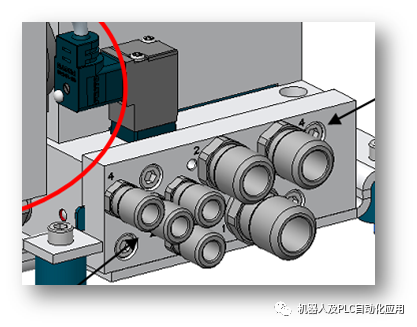
2.检查主气缸附加块(隔断阀)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28390浏览量
206949 -
伺服
+关注
关注
16文章
650浏览量
40953 -
festo
+关注
关注
0文章
22浏览量
5214
原文标题:FESTO气伺服焊钳气管接错后故障分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
其利天下技术·引起伺服电机故障的原因分析·伺服电机驱动方案开发
伺服电机都有它的寿命,当使用到一定程度的时候,可能会出现各类型的故障。我们今天来分析一下可能引起伺服电机故障的原因,以及解决办法。编码器报警

混合气过浓故障的诊断方法与步骤
混合气过浓故障是指发动机在运行过程中,进入气缸的混合气中燃油与空气的比例超过了理想比例,导致燃烧不完全,影响发动机性能和燃油经济性。混合气过浓故障
分接器2进1出为何电脑关机后开机无显示
分接器(或称切换器)2进1出在电脑关机后开机无显示的问题,可能由多种原因造成。以下是一些可能的原因及解决方法: 可能原因 连接问题 : 电脑与分接器之间的连接可能不良,包括电源线、视频线等。 分
松下伺服驱动器故障代码介绍
Panasonic伺服驱动器是一种广泛应用于工业自动化领域的高性能电机驱动设备。在使用过程中,可能会遇到各种故障,这些故障通常通过故障代码来表示。本文将详细介绍Panaso

伺服控制器的常见故障及解决方法
伺服控制器作为工业自动化领域的核心部件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服控制器也会遇到各种故障。本文将对伺服控制器的常见
三菱伺服故障代码分类及处理方法
三菱伺服系统是一种广泛应用于工业自动化领域的高性能电机驱动系统,其故障代码和处理方法对于设备维护和故障排除至关重要。 一、三菱伺服系统概述 1.1
如何判断伺服电机编码器故障?
伺服电机编码器是伺服系统中非常重要的部件,它用于测量电机轴的旋转角度和速度,为控制系统提供反馈信号。如果编码器出现故障,将直接影响伺服电机的性能和稳定性。本文将详细介绍如何判断
伺服驱动器的故障原因及解决方法
伺服驱动器作为现代工业控制系统中不可或缺的一部分,其稳定性和可靠性直接影响到整个系统的运行效果。然而,由于各种原因,伺服驱动器在使用过程中可能会出现各种故障。本文将对伺服驱动器的常见
伺服驱动器err13故障原因怎么解决
伺服驱动器ERR13故障是一种常见的伺服驱动器故障,通常表示伺服驱动器的编码器信号异常。为了解决这个问题,我们需要从多个方面进行
panasonic伺服驱动器故障代码介绍
Panasonic伺服驱动器是一种广泛应用于工业自动化领域的高性能电机驱动设备。在使用过程中,可能会遇到各种故障,这些故障通常通过故障代码来表示。本文将详细介绍Panasonic
伺服电机驱动器的常见故障及解决方法
伺服电机驱动器作为现代工业自动化的核心组件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服电机驱动器也会遇到各种故障。本文将对伺服电机驱动器的常见
看了这篇文章,如何维修伺服电机的故障你就全会了
伺服电机因为长期连续不断使用或者使用者操作不当,会经常发生电机故障,维修又相对复杂的。今天收集了伺服电机发生的13种常见的故障问题的维修方法,供大家学习借鉴。 一、起动
一文详解步进电机和伺服电机接线区别
安装注意事项
·检查L1、L2、L3电源和接线是否正确。
·确认伺服马达输出U、V、W端子相序接线是否正确(接错无法正确使用)。·外接回生电阻为选配件,根据实际需求选择。
CHARGE指示灯长亮,表示主回路带电
发表于 02-26 10:14
•1709次阅读

伺服电机常见的十大故障
通电后电机不转有嗡嗡声
1、故障原因
①转子绕组有断路(一相断线)或电源一相失电;
②绕组引出线始末端接错或绕组内部接反;
③电源回路接点松动,接触电阻大;
发表于 01-04 10:43
•505次阅读





 工商网监
工商网监
评论