 怎样使用最新的运动总线技术促进新型机械设备的设计?
怎样使用最新的运动总线技术促进新型机械设备的设计?
大家在市场上纷纷讨论机械控制网络解决方案,但是,很多公司仍然徘徊于是否使用这些方法。那么,向你的竞争对手学习吧,看看四家机械制造生产商怎样使用最新的运动总线技术促进新型机械设备的设计,控制它们的运动、逻辑运算、人机接口(HMI)以及工厂间的通信。
以太网将修边机引向前沿
早期的现场总线网络的解决方案有时无法提供复杂的、精密的机床所需的加工量。因此,当IMA(www.ima.de/eng)的电气设计总监Günter Redeker考虑将他们的Novimat修边机试点项目重新设计时,他打算采取另一种方法,使用最新的PC技术。
新的机床概念
这种新型的修边机是一个高性能系统,可用于加工木屑板或轻质建筑板材的边缘。Novimat Concept由各模块和可配制加工单元组成,能够进行研磨和修边、倒角、饰面以及修平等加工。该机床使用连续轨迹控制方法精确的监测并控制工件的位置,可以同时加工多个工件。
应用:用于IMA Klessmann GmbH公司家具制造中,专用的修边机和加工中心。
工程挑战:高精度的加工量;带有几千个I/O口和一百多根轴的复杂机床的系统架构。
控制方法:以太网现场总线控制12根轴和集成I/O口,去掉了PC现场总线卡。
系统概述:
· EtherCAT技术机床控制网络
· 每个机床模块有12根轴和30个信号通路
· Ethernet-based I/O口和伺服驱动代替了传统的现场总线
· 连续路径控制
· 辅助CAN-based驱动使用EtherCAT/CAN网关
新的控制平台
当重新设计Novimat时,IMA公司使用了Beckhoff公司(www.beckhoffautomation.com)的用于控制和自动化技术的实时以太网技术(EtherCAT)。IMA公司以前的木工机床上,使用的就是一台Beckhoff公司的PC控制器。这个控制器采用DOS操作系统,光导总线自动化技术和基于PC机的显示和控制。每个机械单元都有一个总线端子I/O站通过光导总线耦合,伺服驱动模块通过PROFIBUS现场总线耦合进行实际的加工,并通过CAN总线与执行机构进行通信。
Redeker说他们转向使用新平台是因为机械安装设备非常复杂,总共有几千个I/O以及一百多根轴。
他说:“以前,为了通过现场总线系统控制这些机床,我们用四芯的光导总线,在机床要求的单一采样速率下收集或传输大量的数据。这样做是达到要求的唯一方法。”
根据Redeker的说法,控制器在处理这些大量数据时需要很强的计算能力。它不仅要把数据从光导总线下载到内存,之后再传送回光导总线,还要根据进程图将输入/输出数据分类。而使用EtherCAT解决方案后,他说:“DMA控制器控制数据在以太网接口和内存之间直接传输,使我们的系统有了很大的改进。”
机床的发展
这种新系统的另一个优点是能够进行连续轨迹控制。连续轨迹控制能够在机床内跟踪工件,实现通路上的精确控制,或者同步快速机床的零件。工件通过机床的速度达到60米/分钟,对应每毫秒移动1毫米并存在潜在的关联偏差。如果连续轨迹控制的时间为2毫秒,那么完成60米长的机床就会产生2毫米的偏差,这样的结果是不精确的,尤其在如今对机床的精度要求越来越高的时候,Redeker将这个值称为临界值(borderline value)。
Novimat Concept是一个单面,自动的修边系统。当材料通过该机床时,机床对其进行单板整边,修边和饰面。
他预见了在机床上完全实现EtherCAT技术后的潜力,这样就能够利用最新、最强大的工业计算机技术。目前大型的生产线需要两台电脑:一台用于用户接口;另一台用于实时控制。Redeker补充道:“希望将来在这些系统中能够只用一台电脑。同时,如果能够只使用一种现场总线,那么工程上和维修上也将简单很多。”
集于一体的建模、仿真和控制
柱面坐标测量机床中,将轴承环与旋转的主轴定心自动化,就是检测并执行动作。但是当目标精度是1—2微米,给定不同尺寸、重量的轴承,并且零件上可能还有油,同时适应系统的摩擦,这样的机床是很出众的。
统一的解决方案
克莱蒙森大学(Clemson University)的国际汽车研究中心(International Center for Automotive Research)总监Thomas Kurfess博士说:“尽管这是一个简单的系统,但在这例应用中你还有很多不知道的地方。用PID控制器使控制精度达到1微米是很困难的,原因多是有摩擦的存在。但是现在,可以使用标准运动控制平台来做到。”
Timken 公司 (www.timken.com) 和 National Instrument公司(www.ni.com)合作研究,Kurfess和他的小组减少了自动化系统中熟练技术工人的工作。
Kurfess说:“使我们能够一步完成建模、仿真和控制的关键技术在于尖端的软件工具。以前我们可以把想要的具有某种功能的系统进行建模和仿真,但是,接下来的控制就不会发生了。你会问‘为什么不行呢?’,答案是更新你的模型吧。”
设计一个有效的控制系统将人工对中的过程自动化,目的是减少定心所用的周期时间。与手工操作相比,自动化系统只需要人工测量时间的15%。
这个自动控制系统由一个线性滑块和一个带有空气轴承的精密转轴组成,空气轴承的作用是提高运动精度以及使运动平滑。一个LVDT位移传感器作为测量装置安装在线性滑块上,与一个固定推杆触点一起驱动轴承环。
一个有效的控制系统使轴承定心的过程自动化,显著的减少了定心所用的时间。
应用:在柱面坐标测量机床中,使给旋转主轴上的轴承环定心的过程自动化。
工程挑战:减少准备时间;保证在高度动态机床系统中,给轴承环定心的重复误差为1½到2微米。
控制方法:使用LabView控制设计和仿真软件,硬件包括PXI/Compact PCI卡和用于运动控制的Soft Motion驱动。
系统概述:
● LabView Control Design Toolkit,实时和仿真模块
● Soft Motion驱动
● 测量装置选用LVDT位移传感器
● 卡尔曼滤波器处理原始数据
设计上的挑战
设计者使用NI公司的 Labview 控制设计工具箱设计并分析系统中的高阶回路环,并可以通过编程给噪声测量装置的输出使用一个定制的卡尔曼滤波器。
Kurfess说:“Labview的伟大之处在于它的信号处理和采样,并不是它的控制功能。”但是,现在的Labview针对基于DSP和FPGA的实时对象,可以使你重新考虑你的控制方法。时间分段功能和软件的优先级可设置扩大了我们的使用范围。十年前,我们选用一个样本并对它进行加工,之后在控制方面,我们做了一些工作研究它的模拟输出。以前软件运行速度取决于计算机,并且你没有很多的性能保证。在新的实时控制目标下,就可以实现对运转性能的保证,并且你可以设置软件的优先级。
Kurfess补充道,在这个应用中使用Soft Motion,使系统的硬件完全透明、无缝并且易于编程。他说:“实时控制器在软件中运行,你需要做的就是转换Soft Motion,以改变对象。你可以改变使其直接在DSP上运行程序,而不用必须在计算机上运行。”
在下一代的Pacesetter上使用集中控制、面向对象的软件、数字联网和紧密耦合、复合坐标伺服控制是Goss International成功的秘诀?这就是1100印刷滚压机的解决方法。
新型机床的设计抛弃了传统机床的动力轴方法,取而代之的是使用尖端的联网控制,这种控制能够保证在网络中任何地方的伺服机构与高速I/O口之间紧密的同步。
根据Goss的高级工程师,Atef T. Massoud博士的说法,他认为实现集中控制,并且用单一的位置基准协调系统中大量的轴是工程上面临的最主要的挑战。
在Pacesetter之后呢?1100是一台基于模块化的机床,它的装配方式是可以根据需要而改变,以适应大批量生产任务的要求。它可以使用六个到四十个进料口,额定速率达到2000件每小时,最多能够有45根轴。然而,用同样的运动控制方法,选用Goss的另一种印后加工设备可以有94根轴。
在这个应用中,Goss选用MEI/Danaher Motion (www.motioneng.com)公司的SynqNet网络和eXMP 控制器。Goss还选用了Advanced Motion Controls (www.a-m-c.com)公司的Digiflex系列的SynqNet Drives,额定功率为1KW;发动机选用Baldor (www.baldor.com)公司的。驱动器是在AMC公司定做的,上面带有附加的I/O口。
应用:Goss International的新一代卷筒纸胶印印后加工设备。
工程挑战:利用集中控制、数字网络和紧密耦合、多轴伺服控制,实现高性能的、电子的传动轴系和凸轮系统。
控制方法:SynqNet控制平台用于闭合核心的位置控制回路,使得控制应用中高达94根轴,并保持系统伺服轴与高速I/O口之间严格的同步。
系统概述:
● 每个eXMP SynqNet控制器能够控制20个以上的伺服电机轴
● Red Hat Linux管理进程调度和应用属性配置
● 伺服系统代替机械的主从式、齿轮传动和连轴器传动系统与上层通信
● 高性能的、动态的系统,具有动态系统调整
● 利用MEI的运动程序接口(MPI),使用C语言编程
集中控制
Massoud说,他们用“面向对象的设计思想”实现机床要求的多线程软件结构,并扩展大量的伺服轴。他说:“实现系统的集中控制方法是我们面临的一个挑战。我们必须设计用一个eXMP控制器控制所有的对象,同时指定20个轴的指令。”
MEI公司的运动程序接口(MPI)一个显著的特征是,它能够在控制平台上重复使用运动程序代码。Massoud说,在这个应用中,他们定义了表示机床状态以及指令的集合或方程,使得系统中的每根轴能够执行。每根轴只能运算它自己的数据,并且只能执行一组事先确定好的控制方程组。
Massoud说:“我们能够做到分离出在同一CPU上运行的不同的轴,是因为每根轴只能运算它自己的数据。”在面向对象的方法中,能够重复使用程序代码以及它的数据运算方法,使得用C语言编制系统程序时很方便,并且保持了系统中大量轴数。
Massoud说道,例如他编制了起始序列和同步序列(homing/synchronization sequences),之后任何一根轴都可以使用这些方程。但是,如果轴10正在使用起始序列方程,那么它只能运算它自己的数据。一旦方程设计好了,就能够被系统中任意的伺服轴使用。
以太网通信
这个应用中面临的另一个挑战是怎样将各个轴的状态与上层控制器或PLC之间进行通信。在生产线上,当传动轴系变成伺服控制之后,Pacesetter上仍然保留了原来的某些零部件?1100从以前的设计中保留下来的零部件之一是PLC,用于控制机床的逻辑性能。通过在PLC和eXMP控制器之间采用以太网进行通信,使用这种方法后,当通信的频带宽度和传输速度增加时可以减轻PLC的通信计算强度。另外,完整的诊断信息可以通过通信,并用进料口处的带触摸屏的HMI显示。
责任编辑:tzh
-
总线技术
+关注
关注
3文章
80浏览量
40762 -
以太网
+关注
关注
40文章
5415浏览量
171552 -
控制网络
+关注
关注
0文章
27浏览量
9519
发布评论请先 登录
相关推荐
机械设备三相滤波器:工业领域的稳定守护者

如何有效保护机械设备免受电磁干扰_交流单相电源滤波器
对机械设备的电气控制有哪些要求
机械设备航空插头应该如何选择
工业平板电脑在印刷机械设备上的应用
机械运动控制系统的组成和应用
精密机械设备运用弧形导轨中如何保持高精度?

微型丝杆在精密机械设备中的优势

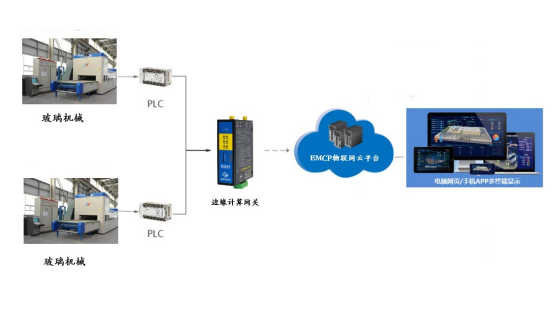
玻璃机械设备远程监控云平台
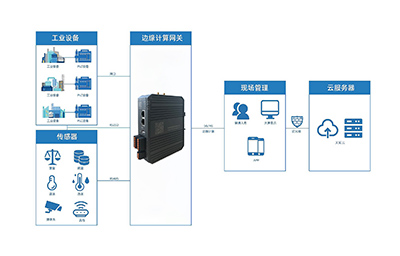
工业智能网关在机械设备数据采集中的应用

主轴:机械运动的核心组件?|深圳恒兴隆机电a
快速实现农业机械设备远程监控






 工商网监
工商网监
评论