 Linux设备与驱动的手动解绑与手动绑定
Linux设备与驱动的手动解绑与手动绑定
众所周知,Linux靠设备与驱动之间的match,来完成设备与驱动的bind,从而触发驱动的probe()成员函数被执行。每个bus都有相应的match方法,完成match的总的入口函数是:
static inline int driver_match_device(struct device_driver *drv, struct device *dev){ return drv->bus->match ? drv->bus->match(dev, drv) : 1;}
而这个总的入口函数又会调用到各自不同总线的match函数,对于platform bus而言,它的match函数就是platform_match()
static int platform_match(struct device *dev, struct device_driver *drv){ struct platform_device *pdev = to_platform_device(dev); struct platform_driver *pdrv = to_platform_driver(drv); /* When driver_override is set, only bind to the matching driver */ if (pdev->driver_override) return !strcmp(pdev->driver_override, drv->name); /* Attempt an OF style match first */ if (of_driver_match_device(dev, drv)) return 1; /* Then try ACPI style match */ if (acpi_driver_match_device(dev, drv)) return 1; /* Then try to match against the id table */ if (pdrv->id_table) return platform_match_id(pdrv->id_table, pdev) != NULL; /* fall-back to driver name match */ return (strcmp(pdev->name, drv->name) == 0);}
从代码可以看出,platform的driver和device之间的match有很多方法成立,比如设备的name和驱动的name相同:
strcmp(pdev->name, drv->name) == 0
比如,设备的名字出现在驱动的ID表中:
if (pdrv->id_table) return platform_match_id(pdrv->id_table, pdev) != NULL;
比如device tree里面的compatible字段与驱动的dt兼容性字段匹配:
if (of_driver_match_device(dev, drv)) return 1;
只要符合其中任意一种,driver和device都可以匹配上。
这种自动匹配非常简单,实施起来也非常容易。
但是有时候,这种自动匹配并不一定是我们想要的。比如我们有时候就是希望XXX设备用YYY驱动,而不是用XXX驱动。工程中有手动匹配的需求,最典型的场景是VFIO的场景,想让设备与内核空间原本绑定的驱动解绑,转而采用内核空间的通用VFIO驱动,而VFIO驱动又提供了userspace驾驭设备的能力。
下面我们来从原理和实践上演示这种手动的unbind和bind是怎么进行的。在《Linux设备驱动开发详解》一书中,我们给出了一个简单的globalfifo设备和globalfifo驱动:
globalfifo-dev.ko(增加platform_device的模块):
static int __init globalfifodev_init(void){ int ret; globalfifo_pdev=platform_device_alloc("globalfifo",-1); ret = platform_device_add(globalfifo_pdev);... return 0; }module_init(globalfifodev_init);
globalfifo.ko(增加platform_driver的模块):
static struct platform_driver globalfifo_driver = { .driver = { .name = "globalfifo", .owner = THIS_MODULE, }, .probe = globalfifo_probe, .remove = globalfifo_remove,}; module_platform_driver(globalfifo_driver);
由于其中的platform_driver和platform_device的name都是“globalfifo”,符合此行的匹配规则:
strcmp(pdev->name, drv->name) == 0
设备和驱动匹配成功,从sysfs也可以看出:
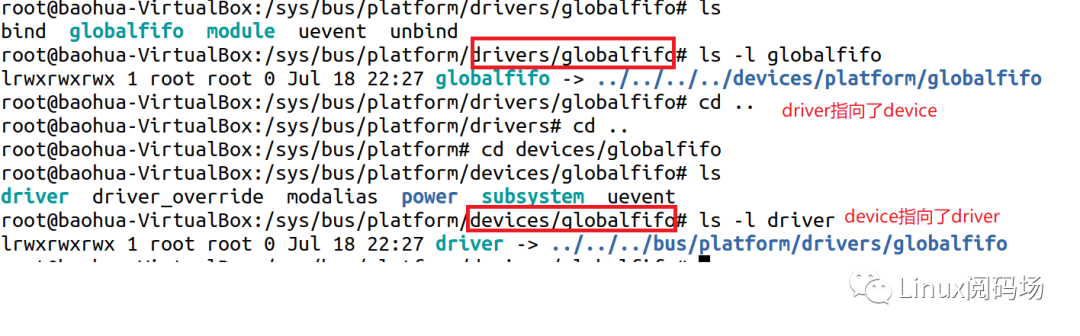
globalfifo的device和driver各自找到了对方。
现在我们来写一个第三者driver,名字叫做globalxxx,然后我们想把globalfifo device的driver指向globalxxx。因此我们要完成2步:
unbind:解除globalfifo driver与globalfifo device的绑定
bind: 进行globalxxxdriver与globalfifo device的绑定
第三者globalxxx驱动代码类似:
globalxxx.ko(增加platform_driver的模块):
static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .probe = globalxxx_probe, .remove = globalxxx_remove,}; module_platform_driver(globalxxx_driver);
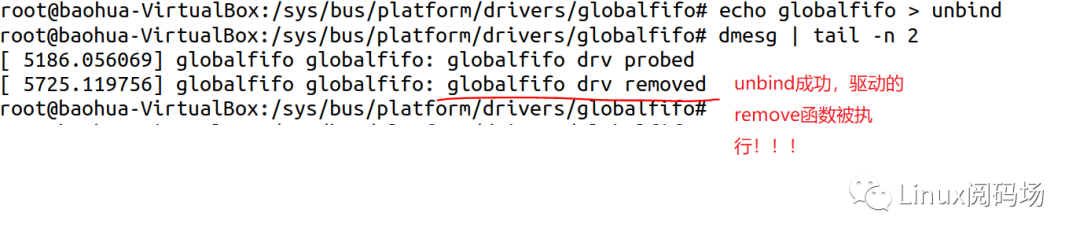
下面我们来完成第一步的unbind,这一步很简单,跑到/sys/bus/platform/drivers/globalfifo目录,把设备globalfifo的名字写进去unbind文件:
当然我们也可以来回折腾着unbind,bind着玩:

这样我们看到一堆的probe(每次设备和驱动bind成功,驱动probe都会执行),remove(每次设备和驱动unbind成功,驱动remove都会执行),最后处于unbind状态。
现在我们来把globalfifo设备bind到globalxxx驱动:
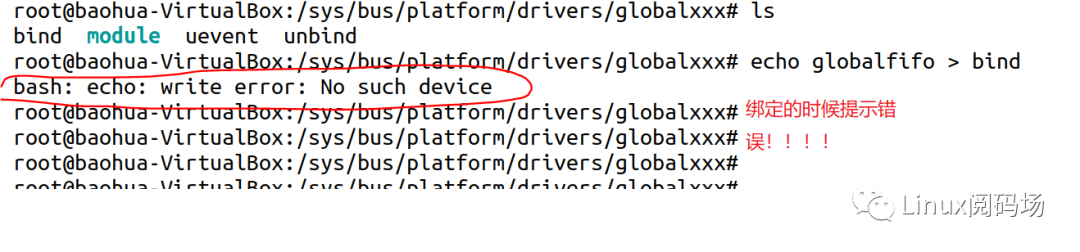
绑定的时候提示错误!
绑定的时候提示错误!!
绑定的时候提示错误!!!
前面我们用globalfifo的driver去bind globalfifo的device的时候,是想怎么绑就怎么绑的,想绑多少次就绑多少次的!为什么换了globalxxx来绑就不行了呢?
爱情不是你想卖想买就能卖
让我挣开 让我明白
放手你的爱
我们来看看这个bind sysfs入口工作的函数bind_store():
static ssize_t bind_store(struct device_driver *drv, const char *buf, size_t count){ ... dev = bus_find_device_by_name(bus, NULL, buf); if (dev && dev->driver == NULL && driver_match_device(drv, dev)) { err = device_driver_attach(drv, dev); if (err > 0) { /* success */ err = count; } else if (err == 0) { /* driver didn't accept device */ err = -ENODEV; } } ...}
看起来,如果要强行bind,仍然需要device_driver_attach()成立,否则内核会返回-ENODEV错误:
} else if (err == 0) { /* driver didn't accept device */ err = -ENODEV; }
根据前文对platform_match()的代码分析,globalxxx driver和globalfifo device确实八竿子都打不着!!没有任何匹配因子。
下面我们来把globalxxx的代码稍微改一下,通过ID表来增加一个匹配因子:
static const struct platform_device_id globalxxx_ids[] = { { .name = "globalfifo", }, {}};MODULE_DEVICE_TABLE(platform, globalxxx_ids); static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .id_table = globalxxx_ids, .probe = globalxxx_probe, .remove = globalxxx_remove,}; module_platform_driver(globalxxx_driver);
rmmod和insmod globalxxx.ko
然后重新bind:
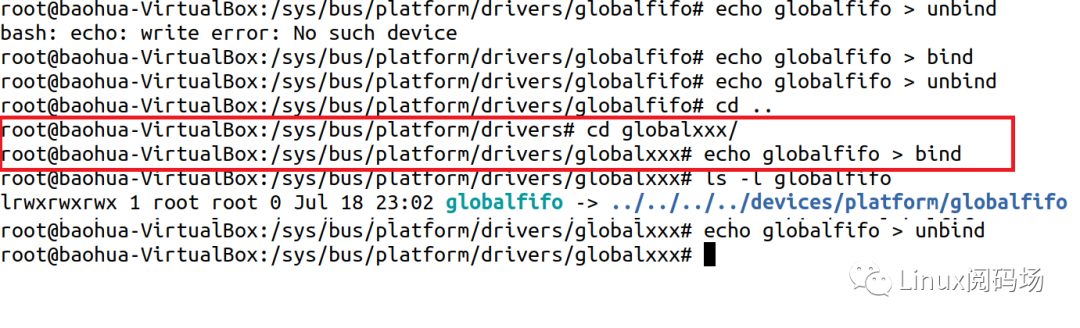
现在globalfifo device可以在globalxxx和globalfifo这2个driver里面进行自由地bind和unbind!
看到这里,客官们一定觉得这太特么狗血了!不是说可以自由地绑定第三者吗?为嘛还要求这个第三者驱动与这个原先的设备匹配呢?这有嘛意思呢?
别忘了,在platform_match中还有这么一行:
if (pdev->driver_override) return !strcmp(pdev->driver_override, drv->name);
设备完全可以自由地宣布她喜欢的第三者driver,哪怕这个第三者driver和她本身完全没有任何的匹配因子,操作的入口就是driver_override sysfs文件。
我们完全可以保留globalxxx驱动的原样
static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .probe = globalxxx_probe, .remove = globalxxx_remove,};
不去增加任何的id_table,而换做到globalfifo device里面去写driver_override文件,宣布globalxxx driver可以匹配globalfifo device。

这样之后,哪怕globalxxx driver和globalfifo device八竿子打不着,也是可以驱动globalfifo device的。工程里面如果我们想用VFIO的方式来驱动一个设备,就可以这样做:
echo vfio-platform > driver_override
-
驱动
+关注
关注
12文章
1838浏览量
85262 -
Linux
+关注
关注
87文章
11292浏览量
209326 -
函数
+关注
关注
3文章
4327浏览量
62569
原文标题:宋宝华:Linux设备与驱动的手动解绑与手动绑定
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RobotStudio 6.08的手动操作方法

linux驱动程序的编译方法有哪两种
延时开关改手动开关怎么接线
万能式断路器怎么手动合闸
TE Connectivity高级手动工具解决方案

电力电容器手动投切和自动投切区别在哪

abb工业机器人手动操作有哪三种模式?
如何手动往esp32 arp列表中添加自定义的arp绑定信息?
数据点修改后未生效的解决方案

浅析非集中控制型消防应急照明和疏散指示系统手动控制的设计与应用
手动光纤检偏器产品介绍
手动光纤起偏器产品介绍
innovus中如何手动拉线及常用快捷键






 工商网监
工商网监
评论