 VASS标准PLC对机器人之间互锁信号的控制
VASS标准PLC对机器人之间互锁信号的控制
VASS标准的A/E41-56机器人互锁信号,A/E81-96用于机器人与PLC确认关闭互锁信号.
每个机器人标准有16个锁定命令可用,这些命令已永久分配给I / O。
在在线驾驶条件下必须查询相应的锁定输入。
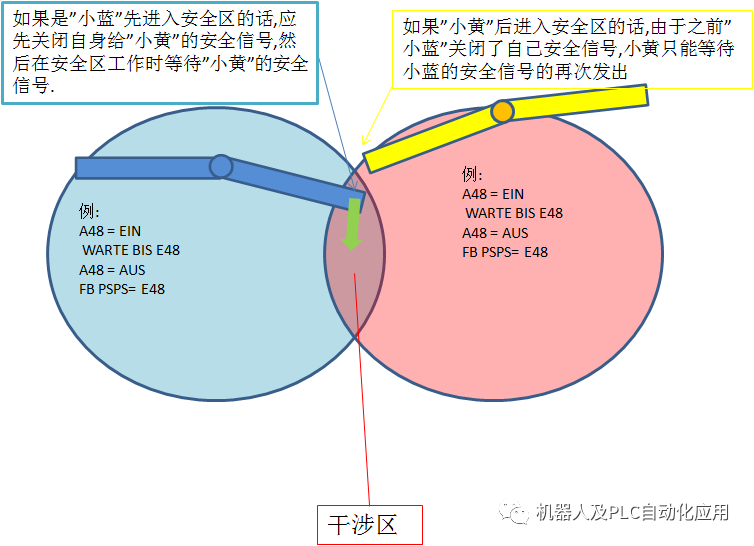
1.进入安全区时:
如果是”小蓝”先进入安全区的话,应先关闭自身给”小黄”的安全信号,然后在安全区工作时等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出
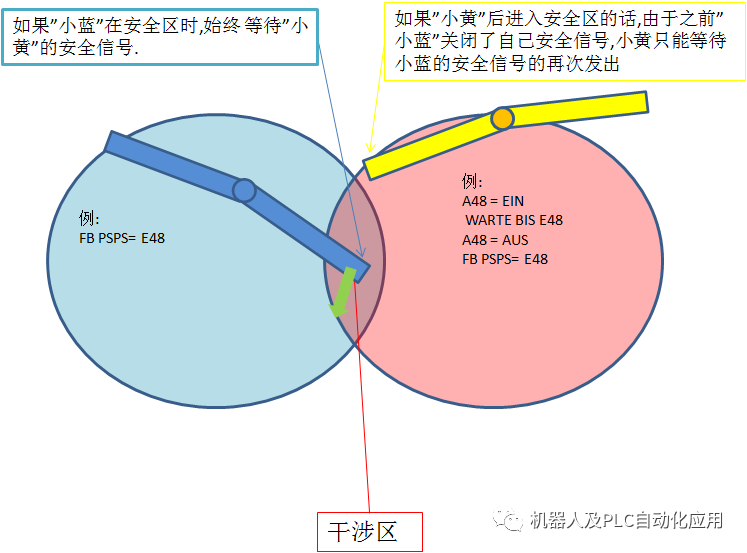
2.在安全区时:
如果”小蓝”在安全区时,始终 等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出.
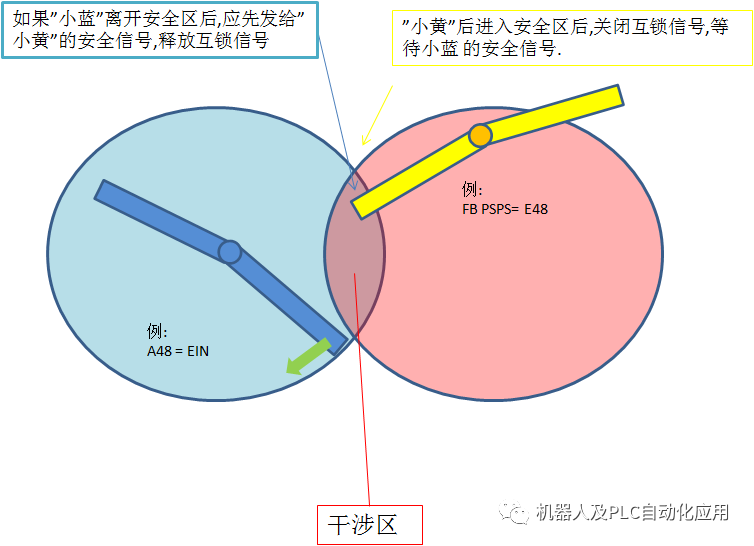
3.离开安全区时:
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.
”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号.
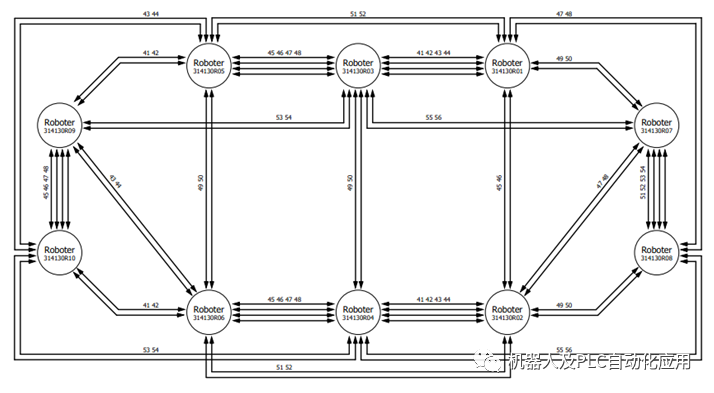
PLC对机器人干涉区的控制:
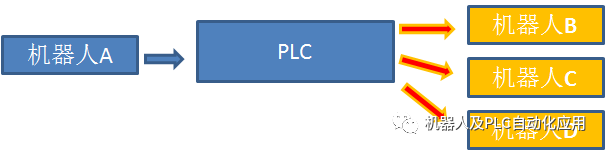
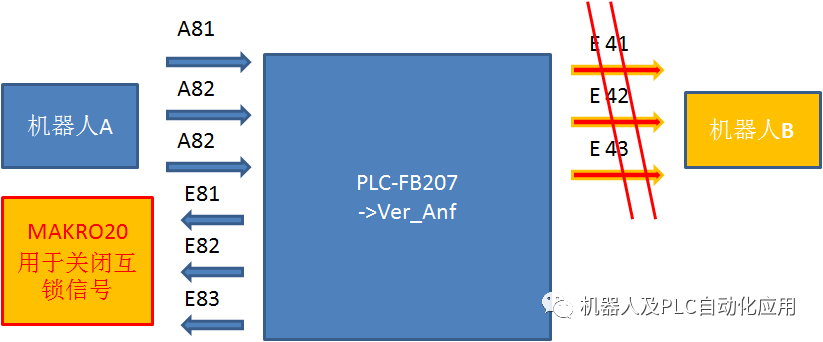
VASS 标准使用的互锁标准:互锁示意图,设定机器人之间互锁所使用的IO范围.
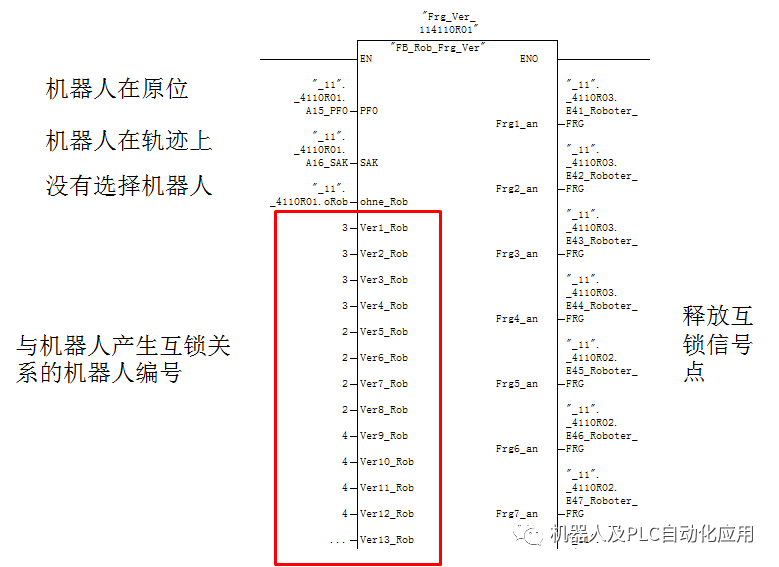
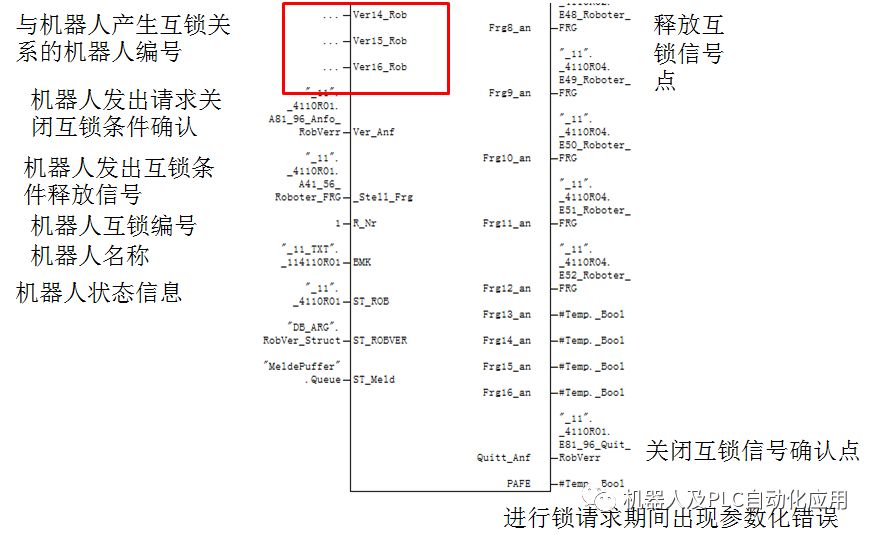
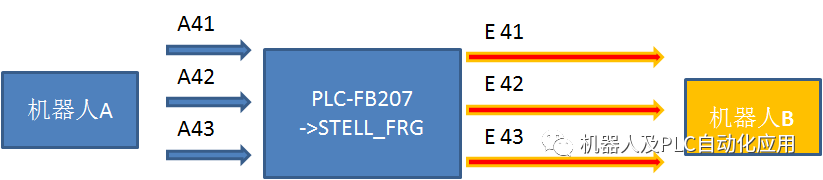
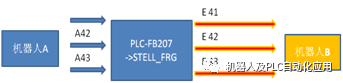
FB207机器人互锁信号控制:
可以设置机器人在原位时默认发出互锁释放信号.
发出互锁条件:
关闭互锁条件:
释放互锁信号
7: A41 = EIN
9: A42 = EIN
11: A43 = EIN
13: A44 = EIN
关闭部分互锁信号,开始进入干涉区工作。
30: A81 = EIN用于请求关闭互锁信号
31: A83 = EIN
32: SPSMAKRO20 = EIN 关闭A41和A43的互锁信号
35: FB PSPS = E41 & E43
等待其他机器人给入的互锁信号才能进入干涉区工作
离开干涉区后再次发出互锁信号
4: A41 = EIN
6: A43 = EIN
FB PSPS = M1 & M30机器人不用再等干涉信号
--------------------
A41 = A41 + A81 再次发出A41
.........
A56 = A56 + A96
WARTE BIS (E81 + !A81) & (E82 + !A82) & (E83 + !A83) & (E84 +!A84) & (E85 + !A85) -PLC检查是否设置正确-
WARTE BIS (E86 + !A86) & (E87 +!A87) & (E88 + !A88) & (E89 + !A89) & (E90 + !A90)
WARTE BIS (E91 + !A91) & (E92 +!A92) & (E93 + !A93) & (E94 + !A94) & (E95 + !A95)
WARTE BIS (E96 + !A96)
WARTE BIS (E41 + !A81) & (E42 +!A82) & (E43 + !A83) & (E44 + !A84) & (E45 + !A85) -察看E41 互锁机器人是否允许进入-
WARTE BIS (E46 + !A86) & (E47 +!A87) & (E48 + !A88) & (E49 + !A89) & (E50 + !A90)
WARTE BIS (E51 + !A91) & (E52 +!A92) & (E53 + !A93) & (E54 + !A94) & (E55 + !A95)
WARTE BIS (E56 + !A96)
A41 = A41 & !A81 -如果给入A81=1关闭A41- 如果不给入A81则不关闭A41
A42 = A42 & !A82
.........
A56 = A56 & !A96
A81 = AUS关闭A81请求关闭PLC信号
........
A87 = AUS
-
机器人
+关注
关注
211文章
28414浏览量
207051 -
plc
+关注
关注
5011文章
13290浏览量
463261
原文标题:VASS标准PLC对机器人之间互锁信号的控制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ModbusTCP转Profinet:ABB机器人与PLC的高效连接
ModbusTCP转Profinet:ABB机器人与PLC的高效连接





 工商网监
工商网监
评论