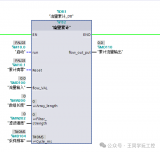
 大摆臂气缸控制块FB410分析:
大摆臂气缸控制块FB410分析:


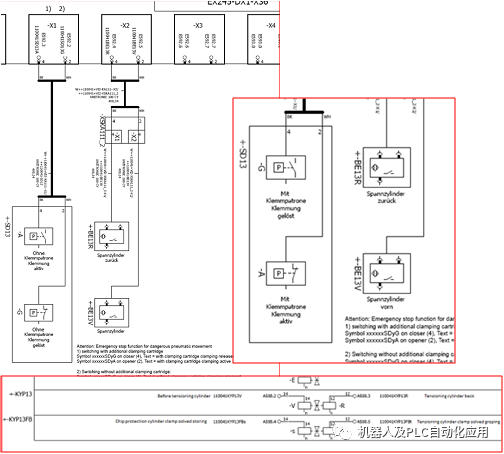
采用该模块,可以利用最多 8 个末位位置反馈信号对提升和倾斜气缸(臂长超过300 mm )进行控制。末位位置反馈信号以字节的方式传送给模块。气缸通过一个五位两通换向阀(用于实现运动)和一个五位三通换向阀进行控制(用于实现夹紧)。该模块可以用于带/不带夹具盒的气缸。该模块一般采用自己的背景数据模块进行访问。
双阀压力控制:

故障列表:
MSys.xF_1 := xF_Frg; //故障释放故障
MSys.xF_2 := xF_VerR;//返回的锁定错误
MSys.xF_3 := xF_VerV;//伸出的锁定错误';
MSys.xF_4 := xF_BFG_R; //检测器控制R故障';
MSys.xF_5 := xF_BFG_V; //检测器控制V发生故障';
MSys.xF_6 := xF_EndR_voA; //离开后端位置没有任何
MSys.xF_7 := xF_EndV_voA; //尝试离开前的终点位置
MSys.xF_8 := xF_EndR;//不要离开后端位置
MSys.xF_9 := xF_EndV;//不要在离开终点位置之前
MSys.xF_10 := xF_ZuebR; //返回时间监控
MSys.xF_11 := xF_ZuebV; //伸出时间监控
MSys.xF_12 := (bF_Stoe & BYTE#1) <> BYTE#0; //‘STE/夹具气缸故障Zyl. a';
MSys.xF_13 := (bF_Stoe & BYTE#2) <> BYTE#0; //'STE/夹具气缸故障Zyl. b';
MSys.xF_14 := (bF_Stoe & BYTE#4) <> BYTE#0; //'STE/夹具气缸故障Zyl. c';
MSys.xF_15 := (bF_Stoe & BYTE#8) <> BYTE#0; //'STE/夹具气缸故障Zyl. d';
MSys.xF_16 := (bF_Stoe & BYTE#16) <> BYTE#0; //'STE/夹具气缸故障Zyl. e';
MSys.xF_17 := (bF_Stoe & BYTE#32) <> BYTE#0; //'STE/夹具气缸故障Zyl. f';
MSys.xF_18 := (bF_Stoe & BYTE#64) <> BYTE#0; //'STE/夹具气缸故障Zyl. g';
MSys.xF_19 := (bF_Stoe & BYTE#128) <> BYTE#0; //'STE/S夹具气缸故障Zyl. h';
MSYS.xF_20 :=xF_FB_1; //故障压力控制夹紧'
MSYS.xF_21 :=xF_FB_2; //夹钳故障未解除
MSYS.xF_22 := xF_KYPxxBER OR xF_KYPxxFBBER; //'STE/阀线圈故障'
摆臂控制原理:
-
数据模块
+关注
关注
0文章
11浏览量
9805 -
气缸
+关注
关注
2文章
54浏览量
13675
原文标题:大摆臂气缸控制块FB410分析:
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
在S7-1200/1500中创建气缸功能块的编程指南

如何使用PLC控制myCobot 320机械臂

西门子TIA Portal中函数FC和函数块FB的相互转换

西门子PID控制算法-FB块封装

西门子流量累计FB块介绍
矽睿霍尔开关应用——气缸感应器



分析讨论单臂电桥电阻的误差原因
磁性开关和气缸怎样配合使用
磁性开关如何控制气缸的两个位置
气缸磁性开关怎么接线
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)


如何调整S7-1500中S7-GRAPH FB的保持性属性






 工商网监
工商网监
评论