 激光焊缝打磨原理2.0版本
激光焊缝打磨原理2.0版本
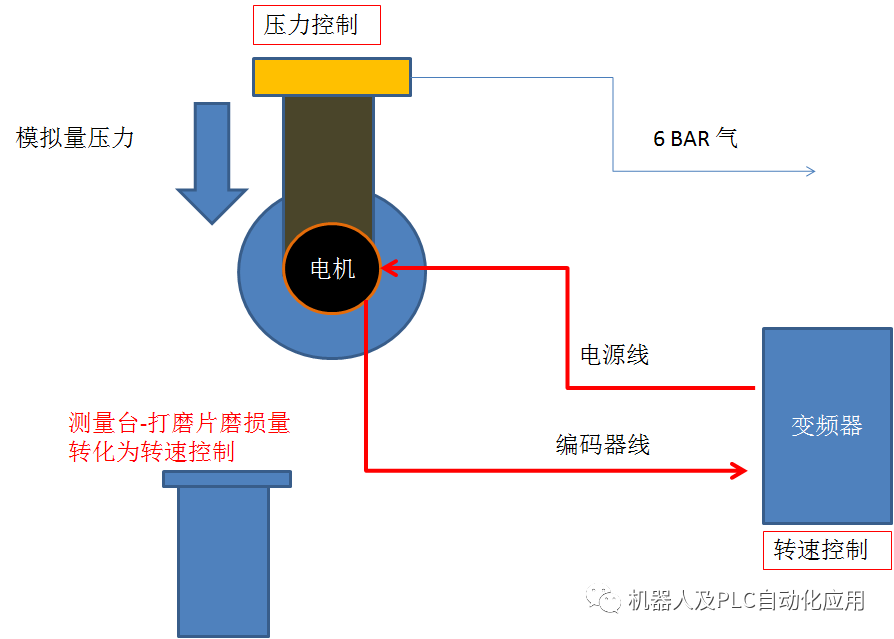
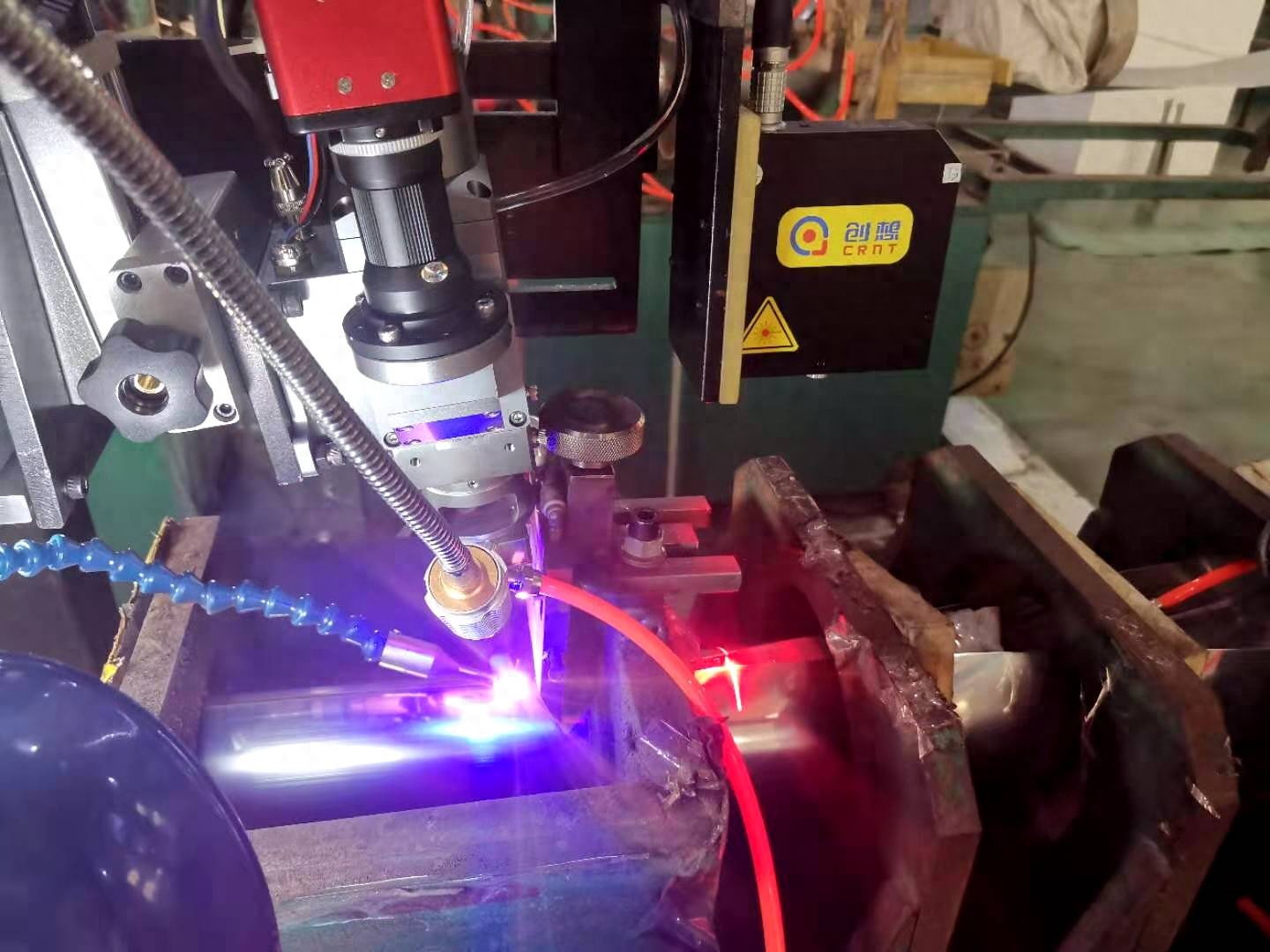
激光焊缝打磨原理.
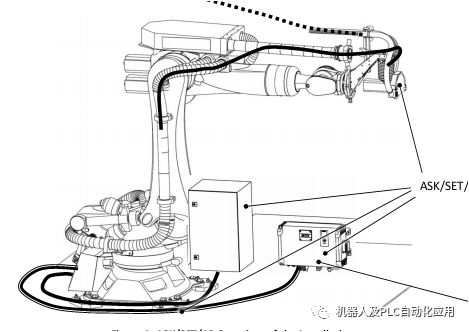
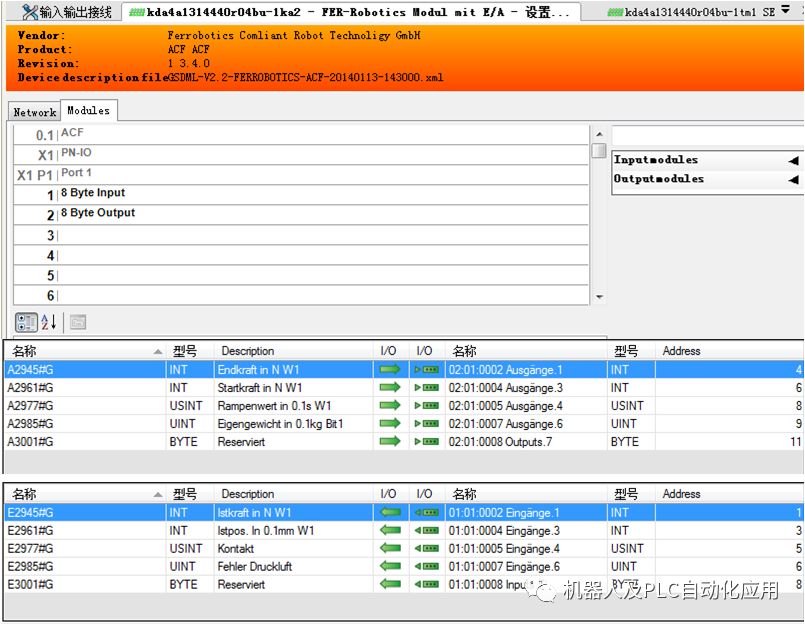
组态ACF伸缩头并分配IO
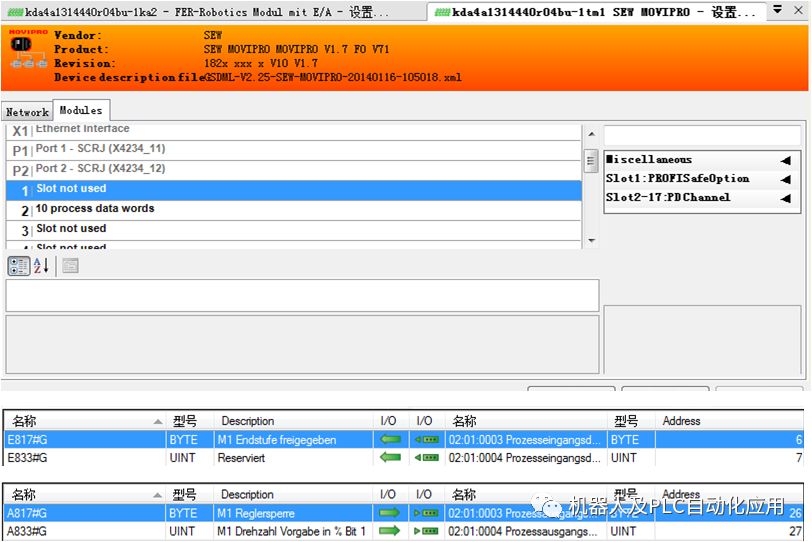
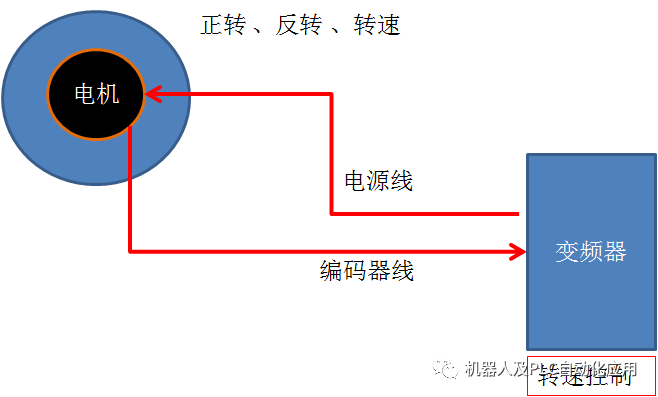
电机打磨的转速控制:
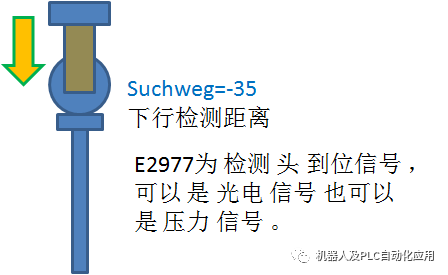
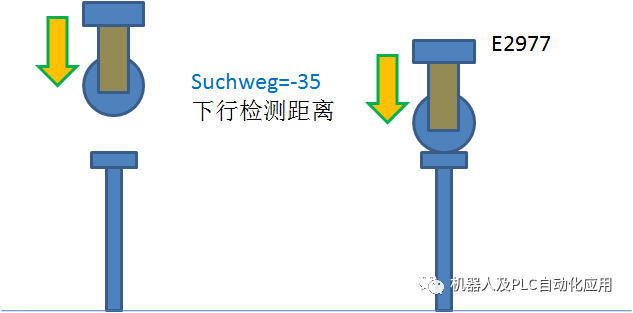
Tech_ Buersten M1 RechtslaufDrehzahl M1 =85 [%] M2Rechtslauf - [%] Suchweg=-35 Buersten-Nr=1 EIN
P1电机转动方向
P2电机转速
P3电机转方向
P4电机转速
P5机器人探测距离
P6:1号打磨头
P7:激活USER
测出打磨片的磨损情况从而改变转速,转速与磨损量成正比关系:
Tech_ Buersten Messen - [%] M2 Rechtslauf - [%] Suchweg=-45Buersten-Nr=1 P7=F830 ----测量
Tech_ Buersten Referenzfahrt - [%] M2 Rechtslauf - [%]Suchweg=-45 Buersten-Nr=1 P7=!F830 ----寻找参考点用于换完打磨片的首次测量
Tech_ Buersten Verrechnen Drehzahl M1 =1 [%] M2 RechtslaufDrehzahl M2 =1 [%] Suchweg=-45 Buersten-Nr=1 EIN ---计算速度
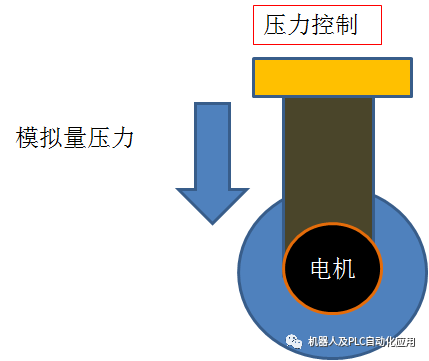
ACF 压力控制:
Tech_ BU ACFTyp-110 Eigengewicht=94 0.1kg Startkraft=10 N Endkraft=1 N Rampe=20 1/10 sekBU-1 P7=!E13
P1 重量的范围,=1-10KG =2-20KG =3-50KG =4-50kg =6-80kg
P2 所带物体的重量
P3 启始压力
P4 维持力
P5 力的斜坡
P6 =1:1号打磨头 =2:2号打磨头
P7 激活用户功能
-
激光
+关注
关注
19文章
3225浏览量
64627 -
变频器
+关注
关注
251文章
6572浏览量
145247 -
焊缝
+关注
关注
1文章
98浏览量
12995
原文标题:激光焊缝打磨原理2.0版本
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光焊缝跟踪器与传统焊缝检测方法的对比

深入解析激光焊缝跟踪器的工作原理与应用优势
激光焊锡时如何控制焊缝精度
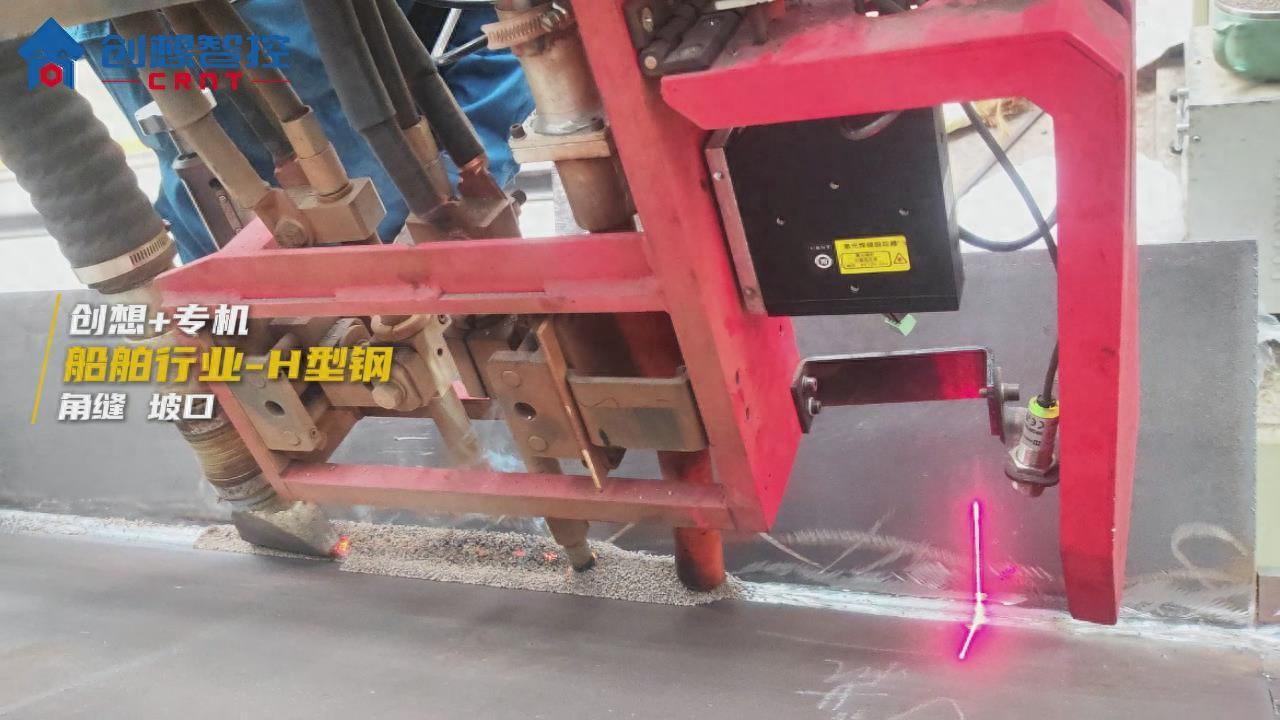
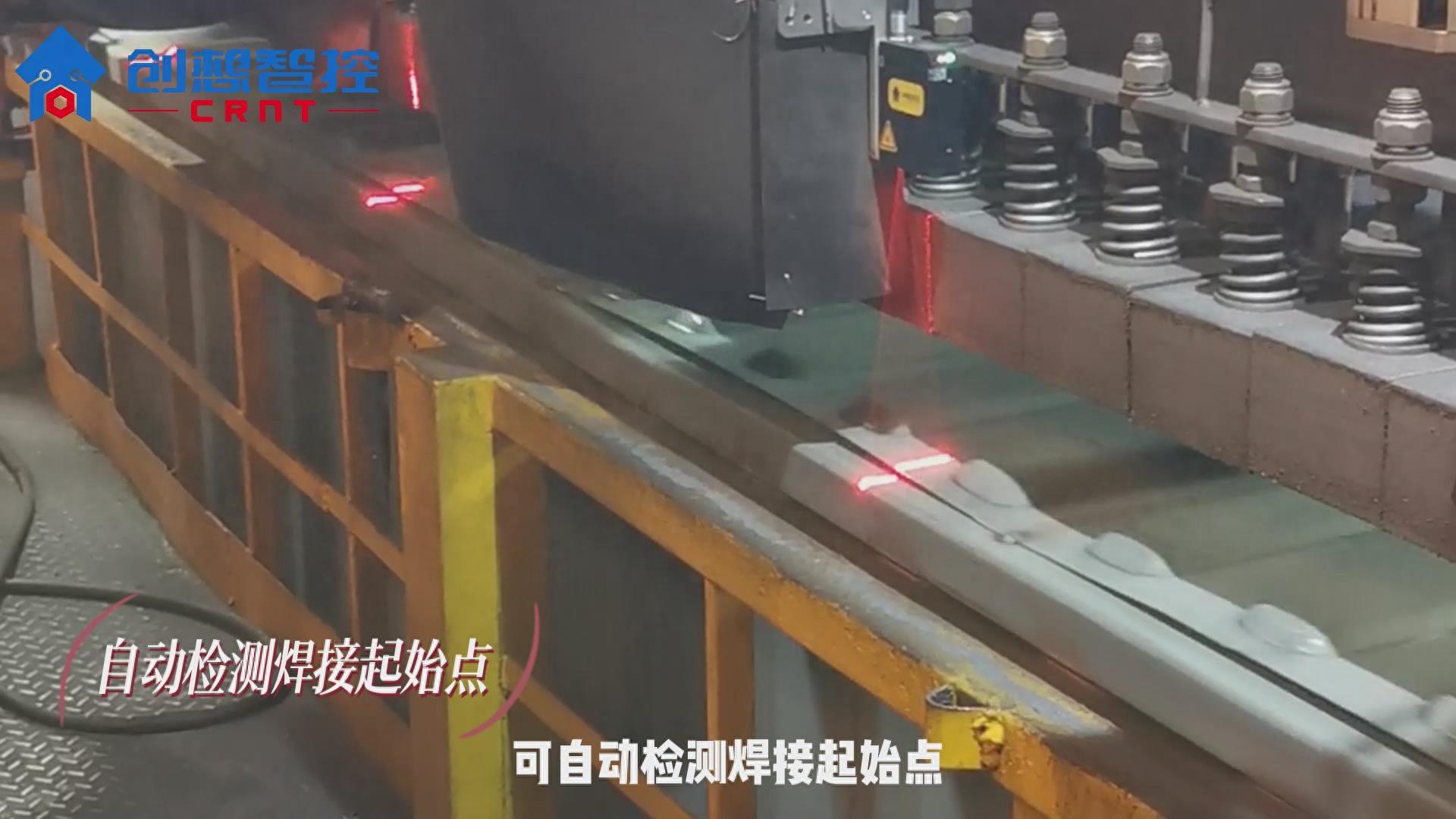
创想智控激光焊缝跟踪系统在H型钢多层多道焊接自动化的应用
创想智控激光焊缝跟踪系统协同焊接专机自动化焊接灭火器罐的应用

创想智控焊缝跟踪系统运用激光寻位在工程汽车高机底座焊接的应用

USB4 2.0版本的重大更新
创想智控激光焊缝跟踪器在机械法兰盘自动扫描焊接的应用

创想智控激光焊缝跟踪传感器在机械底盘自动引导焊接的应用

如何集成激光焊缝跟踪系统与现有焊接设备

创想智控激光焊缝跟踪系统在波纹板自动化焊接的应用
LwIP v2.0版本更换为v2.1.2版本后接收不到数据了怎么解决?
激光焊缝跟踪技术的精度和稳定性如何





 工商网监
工商网监
评论