 气伺服焊钳平衡缸故障分析
气伺服焊钳平衡缸故障分析
焊钳结构:---平衡缸的位置
平衡缸控制阀的位置:
MPYD为压差控制阀,可对平衡缸压力在+/-10bar之间调节,由机器人控制给入:
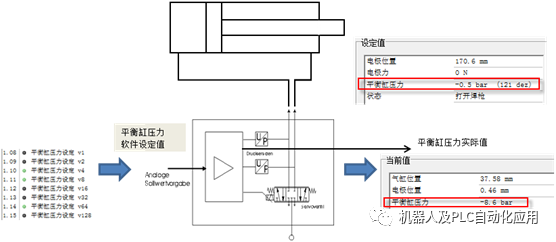
焊钳进行位置模式控制下:
平衡气缸处于缩回位置ΔP < 0
焊接臂顶住螺钉,停止锁死位置,E719
焊钳在力模式控制下:
平衡气缸处于伸出位置 ΔP > 0
焊接臂自由状态,浮动位置.! E719
机器人控制A729-A736:平衡缸压力设定: 采用二进制控制.BIN2
$BIN_OUT[2]={F_BIT 729,LEN 8,PARITY #NONE}
5: bin2 ( EIN ) = 114 在夹紧焊接前会通过二进制给焊钳平衡缸值
6: WARTE BIS !E129 + E26
7: SPSMAKRO80 = EIN 焊接程序
bin2 ( EIN ) = 0-255 / 压力值: -10-à+1010bar
E12平衡缸超时: 原因: 平衡气缸,MPVD平衡缸比例阀,线束.
| 平衡缸压力未能在2秒内达标。 | 气源供给压力足够高么?检查 MPYD /电缆 | 出现故障后会没有E705准备就绪 |
出现平衡故障时:
1.如果MPVD气阀没有坏时,可以通过用WD-40进行润滑气缸.
2.如果润滑无效直接检查连线.
3.连线无问题,直接换MPYD阀.
平衡缸回位信号: 焊接过程时如果平衡系统没有问题时,平衡缸回位反馈E719应该是没有反馈的,而当进行轴运行时E719要始终有.
| E719 | Equalizer is back | 平衡气缸返回 |
拆解MPVD控制阀:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服
+关注
关注
16文章
651浏览量
40963 -
控制阀
+关注
关注
1文章
94浏览量
13804
原文标题:气伺服焊钳平衡缸故障分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
其利天下技术·引起伺服电机故障的原因分析·伺服电机驱动方案开发
伺服电机都有它的寿命,当使用到一定程度的时候,可能会出现各类型的故障。我们今天来分析一下可能引起伺服电机故障的原因,以及解决办法。编码器报警

伺服电机常见故障及解决方法有哪些
伺服电机在运行过程中可能会遇到多种故障,以下是一些常见故障及其解决方法: 一、伺服电机不转动 故障原因 : 电源未连接或接触不良。 驱动器与
混合气过浓故障的诊断方法与步骤
混合气过浓故障是指发动机在运行过程中,进入气缸的混合气中燃油与空气的比例超过了理想比例,导致燃烧不完全,影响发动机性能和燃油经济性。混合气过浓故障
松下伺服驱动器故障代码介绍
Panasonic伺服驱动器是一种广泛应用于工业自动化领域的高性能电机驱动设备。在使用过程中,可能会遇到各种故障,这些故障通常通过故障代码来表示。本文将详细介绍Panaso

伺服控制器的常见故障及解决方法
伺服控制器作为工业自动化领域的核心部件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服控制器也会遇到各种故障。本文将对伺服控制器的常见
三菱伺服故障代码分类及处理方法
三菱伺服系统是一种广泛应用于工业自动化领域的高性能电机驱动系统,其故障代码和处理方法对于设备维护和故障排除至关重要。 一、三菱伺服系统概述 1.1
如何判断伺服电机编码器故障?
伺服电机编码器是伺服系统中非常重要的部件,它用于测量电机轴的旋转角度和速度,为控制系统提供反馈信号。如果编码器出现故障,将直接影响伺服电机的性能和稳定性。本文将详细介绍如何判断
伺服驱动器的故障原因及解决方法
伺服驱动器作为现代工业控制系统中不可或缺的一部分,其稳定性和可靠性直接影响到整个系统的运行效果。然而,由于各种原因,伺服驱动器在使用过程中可能会出现各种故障。本文将对伺服驱动器的常见
三菱伺服故障代码大全及处理方法
三菱伺服电机是工业自动化领域中广泛应用的一种高性能电机,其故障诊断和处理对于保证生产效率和设备稳定性至关重要。本文将详细介绍三菱伺服电机的故障代码及其处理方法,以帮助用户快速定位问题并
伺服驱动器err13故障原因怎么解决
伺服驱动器ERR13故障是一种常见的伺服驱动器故障,通常表示伺服驱动器的编码器信号异常。为了解决这个问题,我们需要从多个方面进行
panasonic伺服驱动器故障代码介绍
Panasonic伺服驱动器是一种广泛应用于工业自动化领域的高性能电机驱动设备。在使用过程中,可能会遇到各种故障,这些故障通常通过故障代码来表示。本文将详细介绍Panasonic
伺服电机驱动器的常见故障及解决方法
伺服电机驱动器作为现代工业自动化的核心组件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服电机驱动器也会遇到各种故障。本文将对伺服电机驱动器的常见
伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗
伺服电缸是一种通过电动机驱动实现线性运动的设备,它的原理和结构可以简单描述如下: 原理: 伺服电缸的原理基于电动机的转电磁效应和转换机械能的能力。通过电动机的正反转和电流的控制,可以实

伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗
伺服电缸通常采用闭环控制系统,通过反馈信号实时调整电机的转速和位置,以达到精确的运动控制。而伺服压机一般采用闭环或开环控制系统,通过控制液压系统或压力传感器实时调整压力或力量,以满足加工需求。
发表于 01-22 17:21
•1678次阅读





 工商网监
工商网监
评论