 简述KUKA外部轴的几种应用
简述KUKA外部轴的几种应用


对于旧的8.2X系统使用的外部轴插件是SynchroMove

对于最新8.3X系统
要分两种:
WorkVisualAddOnVKR:
用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服设备(由机器人以外设备控制伺服电机设备)例如:伺服铆钳,气伺服焊钳

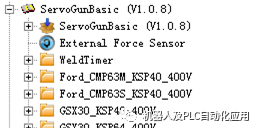
ServoGunBasic:

用于KUKA机器人直接供电控制使用,KSP供电控制使用。

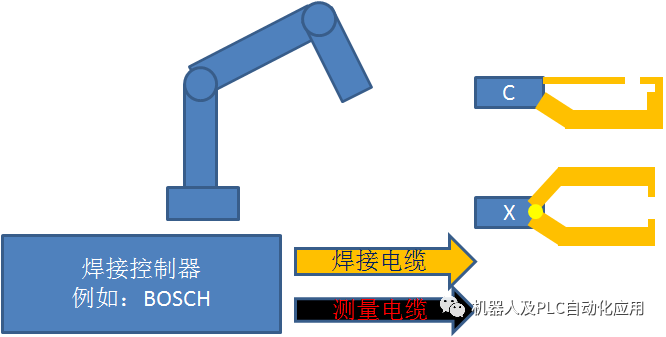
WELDTIMER 分配与焊接控制器相 关联例如:BOSCH

ServoGun:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28512浏览量
207495 -
伺服电机
+关注
关注
85文章
2053浏览量
57967 -
KUKA
+关注
关注
3文章
217浏览量
16563
原文标题:简述KUKA外部轴的几种应用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

外部端口和内部端口是什么意思
在计算机网络和网络安全领域,"外部端口"和"内部端口"这两个术语通常用来描述网络通信中的端口配置和访问控制。 外部端口(External Port) 外部端口通常指的是面向互联网或外部



EtherCAT PLC带轴数的限制影响因素
EtherCAT PLC带轴数的限制主要受到以下几个方面的影响: (1)PLC型号和规格: 不同型号的PLC支持的轴数不同,如广成科技GCAN-PLC-530最多支持24轴。 (2)硬件限制
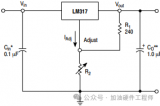
总结一下LM317的几种经典应用电路
说起LM317,我们做硬件的都很熟悉了,它是LDO的一种,并且输出电压很容易通过外部电阻进行调整,今天总结一下LM317的几种经典应用电路。
电力系统外部过电压有哪几种类型
外部过电压是指电力系统在运行过程中,由于外部原因导致电压异常升高的现象。外部过电压可能来自电力系统的故障、天气条件变化、雷击、负荷变化等。下面将对电力系统外部过电压的
什么是串行端口?有哪几种分类?
端口有几种不同的分类,包括以下几种: 1. RS-232:RS-232是一个标准的串行通信接口,最早用于连接计算机和调制解调器、打印机等外部设备。它使用9针的D型插座,每个针脚有不同的功能,如数据传输、数据接收、控制信号等。RS
陀螺仪x和y比例是多少 陀螺仪x轴和y轴是指什么
陀螺仪是一种用于测量和感应物体旋转和转动的设备,它通常由三个轴组成:x轴、y轴和z轴。在陀螺仪中,x轴和y






 工商网监
工商网监
评论