 自动驾驶汽车借用各种各样的传感器检测物体并跟踪其行进速度与方向
自动驾驶汽车借用各种各样的传感器检测物体并跟踪其行进速度与方向
埃隆·马斯克曾经多次强调,特斯拉公司将在2020年年底之前打造出全自动驾驶汽车。“这方面存在很多小问题,最大的挑战就是如何把这些小问题全数解决掉,再整合进一套统一的系统当中。”
虽然这种完全无需人为干预就能应对旅程中种种状况的汽车(业界称之为「L5级自动驾驶」)也许正在走近,但实际生产出能够安全合法上路的自动汽车却又是另一码事。
全自动驾驶汽车之所以迟迟上不了路,是因为其中仍存在着不少根本性挑战。下面来看五大最为核心的障碍。
1. 传感器
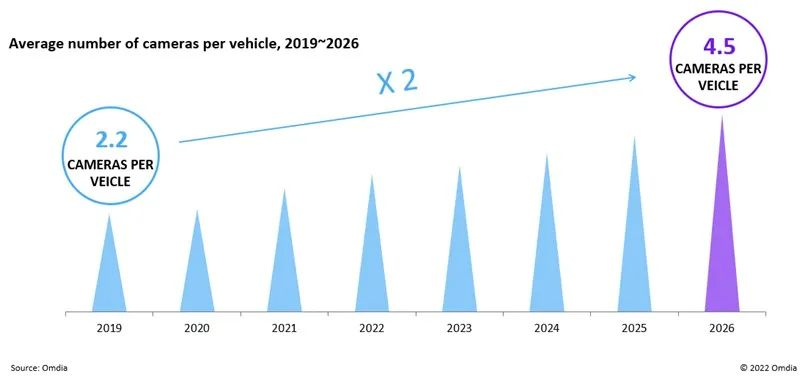
自动驾驶汽车使用各种各样的传感器以“观察”周边环境,帮助系统检测诸如行人、其他车辆以及路标等物体。摄像头负责帮助汽车获得视觉,激光雷达负责测量物体与车辆之间的距离,普通雷达则检测物体并跟踪其行进速度与方向。
这些传感器会不断将数据馈送至汽车的控制系统或计算机端,借此决定应在哪里转向或者何时进行制动。全自动驾驶汽车需要一套能够在一切条件及环境下,准确检测物体、距离、速度等指标的传感器,且全程无需人为介入。
但恶劣的天气、繁忙的交通以及带有涂鸦的道路标志,都会对传感器的识别能力产生负面影响。特斯拉使用的雷达虽然不太容易受到恶劣天气条件的影响,但却仍无法达到全自动驾驶汽车对于物体检测水平的严苛要求。
就目前的情况看,特斯拉的“autopilot”L2级自动驾驶已经酿成过不少事故,包括今年7月撞上了其他驻停车辆。事实证明,该公司的传感器在应对全天候行驶场景时,还有很长的路要走。
2. 机器学习
大部分自动驾驶汽车使用人工智能与机器学习处理来自传感器的数据,并根据结合做出关于下一步行动的具体决策。这些算法将帮助系统识别传感器检测到的目标,并根据训练经验将目标分类为行人、路灯等。最后,汽车再使用此信息确定是否需要回避检测到的物体,以及接下来需要采取哪些行动——例如制动或转弯等。
未来,机器也许会拥有比人类驾驶员更高效的对象检测与分类能力。但至少就目前来看,汽车中所使用的机器学习算法仍然缺少充分的安全性依据。在如何训练、测试或验证机器学习算法方面,各标准化机构乃至整个自动驾驶行业都还没有达成共识。
3. 开放道路
自动驾驶汽车在驶入开放道路之后,还将继续自己的学习过程。它会在新的路段上行驶,检测出训练中从未遇到过的物体,并据此进行软件更新。
那么,我们该如何保证系统能够始终拥有与已验证版本拥有相同的安全性?我们必须能够证明一切新的学习结论都安全可靠,且系统不会忘记之前掌握的安全知识。遗憾的 是,业界目前对此还没有统一的解决思路。
4. 监管要求
不单是自动驾驶领域,目前还没有哪个行业针对自主系统出台充分的标准与法规。现有车辆安全性的标准假设,要求驾驶员能够在紧急情况下立即接管。
对于自动驾驶汽车,法规只针对某些特殊功能(例如自动车道保持系统)做出了规定。至于包括自动驾驶汽车在内的自动驾驶系统,虽然已经有国际标准设定了部分相关要求,但暂时还没有解决之前提到的传感器、机器学习与行为学习方面的问题。
因此,只要没有公认的法规与标准,自动驾驶汽车无论是否安全、都无权在开放道路上正常行驶。
5. 社会接受度
特斯拉目前的自动驾驶功能已经先后引发多起事故。由此引发的社会认可度低下问题不仅来自打算购买这类产品的用户,也来自与这类用户共享道路的其他交通参与者。
公众需要参与到自动驾驶汽车的引入与采用决策当中。如果缺少这个环节,此项技术就有可能被人民群众拒之门外。
很明显,只有解决了前三项挑战,我们才有机会攻克最后两个障碍。目前,业界各方都在争取成为第一家推出全自动驾驶汽车的厂商。但是,如果我们未能就实现汽车安全、提供安全证明以及通过监管机构/公众合作取得认可接纳达成共识,那么自动驾驶汽车在未来几年中仍然只能长期处于测试阶段。
对于马斯克这样的企业家来说,这样的现状无疑令人沮丧。但正是因为遍布荆棘,率先在安全、保障、法规与接纳度等领域取得突破的厂商,才能发展为新的巨头、并引领整个新的时代。
责任编辑:pj
-
传感器
+关注
关注
2548文章
50656浏览量
751803 -
机器学习
+关注
关注
66文章
8375浏览量
132397 -
自动驾驶
+关注
关注
783文章
13679浏览量
166110
发布评论请先 登录
相关推荐
MEMS技术在自动驾驶汽车中的应用
汽车雷达回波发生器的技术原理和应用场景
使用STT全面提升自动驾驶中的多目标跟踪

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶汽车传感器有哪些
XV7181BB 陀螺仪传感器在自动驾驶设备中的应用

揭秘自动驾驶:未来汽车的感官革命,究竟需要哪些超级传感器?
未来已来,多传感器融合感知是自动驾驶破局的关键
探索自动驾驶传感器仿真模型的可信度






 工商网监
工商网监
评论