 扫地机器人竞争进入白热化,AI视觉异军突起成为黑马
扫地机器人竞争进入白热化,AI视觉异军突起成为黑马
扫地机器人作为家庭清洁电器市场的“智能化担当”和“网红担当”,在“懒人经济”的加持下,这一品类的消费市场竞争可谓声势浩大。目前,扫地机器人行业玩家云集,无论是iRobot、科沃斯等老牌厂商持续深耕,还是小米、360等在新晋智能家居布局的玩家,同样的大牌家电及小家电企业纷纷入局。从近年各大品牌发布的产品来看,相较于扫地机器人清洁能力升级的竞争,导航、避障等智能化升级这一赛道的竞争更为精彩、激烈。
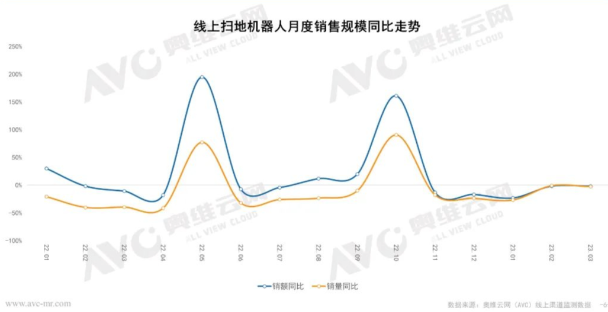
随着规划导航系统的不断完善,智能型的全局导航规划类产品占比已突破85%,据奥维云网(AVC)线上渠道监测数据,2020年上半年,激光导航产品的零售额占比从去年同期的45.2%增至54.9%;视觉导航产品的占比从12.3%提升至17.7%;搭载AI(人工智能)技术的“激光、视觉”导航产品的占比则从1.6%增至7.8%。无独有偶,新发布的中高端扫地机器人中,AI视觉技术应用几乎已经成为了“标配”,带来的功能升级也是眼花缭乱。前有Dyson 360 Heurist的360°鱼眼摄像头用来识别以及配合TOF完成测距,后有科沃斯T8 AIVI的122°广角摄像头进行识人辩物,视频监控互动,以及石头T7 Pro的双目摄像头用来执行避障功能。可以看得出扫地机器人行业会越来越像成熟的消费电子产品,消费者会形成对各种关键的配置、参数的认知,左右其购买决策。
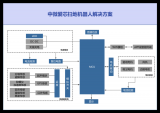
扫地机器人的核心技术点主要集中在清洁系统、建图系统、避障、人机交互四项上,一个好的产品在这四个维度上都要向前走,需要不断做技术沉淀来将每个纬度做到最好,而AI视觉既可以覆盖其中定位建图和避障,亦能够在人机交互中大放异彩,这便是信息丰富的视觉技术所带来的天然优势,同时也具有更高的技术门槛。
定位建图(Localization&Mapping)作为导航的基础,也是扫地机器人工作的第一步,对于机器人来说,将周围环境数字化、结构化,才能制定更清晰的行进路线及清扫模式。我们目前常见的扫地机器人半数以上采用激光SLAM,部分高端线产品采用激光 SLAM 和单目视觉SLAM 融合的方式。激光 SLAM在实际清扫过程中容易受到环境,实时动态变化的影响,影响整体地图的规划,也就是我们在生活中遇到的扫地机器人出现的盲扫、反复清扫、漏扫的情况,单目视觉技术主要通过加入可见光摄像头进行辅助定位,使扫地机器人移动过程中可以对图像进行连续跟踪,进行相机姿态和物体之间相对位置变化的估算,但单个摄像头进行估算时,缺少深度信息,容易存在误差,导致建图效果较差。
从行业角度来看,扫地机器人需要从2D导航向3D导航发展,市面上三维视觉感知方案主要有单目结构光,双目可见光和ToF。扫地机器人作为消费级产品,BOM成本则是关键,ToF相对来说成本偏高,结构光更适合近距离的应用场景。双目立体视觉通过三角测量原理使用两个摄像头来对目标点的三维空间位置进行定位,双目视觉传感器在成本优势明显的同时,可以捕获更为丰富的环境信息,同时用于感知,提供更宽阔的应用空间。INDEMIND扫地机器人AI视觉导航采用双目立体视觉,通过自研高精度Vi-SLAM技术结合环境/物体语义完成三维立体建图,建图效果优于激光SLAM,采取智能路径规划算法进行弓行清扫,有效提高扫地机器人工作效率。
避障是目前扫地机器人的主要痛点之一,误扫、误触以及引发的一系列扫地机人无法脱困以至故障是用户体验差的主要原因。当前扫地机人避障亟需解决三个问题:一是检测范围较小,无法实现大范围障碍物检测;二是无法精准获取障碍物深度信息,多采用试探性碰撞方式来确定障碍物实际位置;三是无法获取障碍物的具体属性信息,时有漏扫、误扫等情况。INDEMIND扫地机器人AI视觉导航通过双目立体视觉结合高精度物体识别(识别精度<2cm),提供0.05-1.5m范围内误差<1%的深度解算功能,配合水平>60°、垂直>30°的视场角,可有效覆盖柜底边缘、近地处的电线等障碍物,实现全范围避障。INDEMIND于今年还推出了专为扫地机器人避障研发的AI双目避障模组,旨在加速扫地机器人产品避障功能升级。
人机交互功能可以给用户对于产品智能化程度最为直观的体验,扫地机器人的感知能力则是基础,AI视觉可为扫地机器人提供最为丰富的环境信息,让扫地机器人“看到”且“知道”真实的家居环境,执行更多的工作命令。用户还可以通过扫地机器人移动监控家居实景画面,与家里宠物进行互动,识别不同人物身份以进行陪伴等更多人机互动功能。
目前,国内扫地机器人市场渗透率刚到5%,应用较早的美国扫地机器人市场渗透率也仅为10%,有关专家预计,到2021年我国的扫地机器人市场规模将达到224亿元左右。机遇与挑战并存,扫地机器人行业已处于技术创新密集期,AI视觉也将是扫地机器人智能升级的重要课题。
fqj
-
AI
+关注
关注
87文章
30945浏览量
269185 -
导航
+关注
关注
7文章
528浏览量
42416
发布评论请先 登录
相关推荐
智能扫地机器人的工作原理和构成
扫地机器人应用解决方案
霍尔开关在扫地机器人中的应用
破解大面积场景清洁难题,普渡推出AI智能扫地机器人PUDU MT1
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
光耦知识分享‖探讨光耦技术在扫地机器人的应用

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
扫地机器人CCC认证申请流程与其他产品的区别是什么?







 工商网监
工商网监
评论