 日立集团研发出更经济实惠又紧凑的全向立体摄像头系统
日立集团研发出更经济实惠又紧凑的全向立体摄像头系统
日立集团为不断增长的ADAS(高级驾驶辅助系统)市场研发出更经济实惠又紧凑的全向立体摄像头系统。
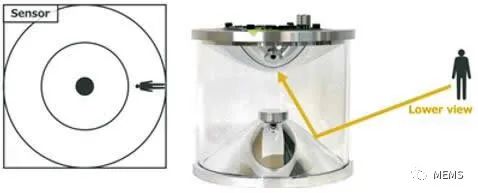
日立集团最新研发的全向立体摄像头
自动驾驶需要更紧凑的、低成本的设备用于360°成像和周围物体的距离测量。据麦姆斯咨询报道,近日,日本科技巨头日立公司(Hitachi)的研究人员开发出了一种基于两个双曲面镜以及一组微镜和传感器的全向立体摄像头,从而使该摄像头比众多传统的ADAS光学系统成本更低。
在刚刚结束的SPIE光学和光子学数字论坛上,Ryota Kawamata介绍了他的团队为自动驾驶开发的紧凑型全向立体摄像头。尤其是日立集团为该款经济型摄像头设计的一种新型校准方法。
Kawamata的演讲中说道:“基于C. Mei和P. Rives开发的校准方法,我们考虑通过更高阶的径向畸变、精细的切向畸变、图像传感器倾斜度和微镜镜面偏移,提高了校准精度。”
目前该方法已应用于日立公司的全向立体摄像头样机中。它的优点是将校准精度的均方根降低多达2.2倍。Kawamata说道:“对于ADAS及其它更多应用,相距14 m的物体,距离误差小于8%,与原始方法相比,误差改善了7倍多,尽管该误差仍大于5%的目标值。”
该小组仍在致力于改进该设备和方法的性能。“我们认为剩余的校准误差是由于玻璃镜筒的变形和光学分辨率的降低而引起的。在今后的研发中,我们计划在样机的校准和光学分辨率上做进一步的改进。此外,还需要开发一种镜筒扩展图像的校正方法。”Kawamata补充说道。
Kawamata还解释说到,市场可能需要更便宜的基于激光雷达的传感系统,该系统可提供更宽的视野,也就是车辆周围360°无死角的视野。“我们预计,2018至2030年间,对ADAS和AD(自动驾驶)系统的需求将增长约400%。其中具有全方位视场角(FOV)的高级系统的比例也将显著增长。”
“为了以较低的成本实现全向视图,通常需要结合激光雷达,再通过计算接收反射光的时间来测量到物体的距离。例如,Waymo公司使用五个激光雷达对其系统进行360°覆盖。按照这种方式,距离误差非常低,只有0.1%,但是成本很高,每个系统约2000美元。”
“我们目前使用的立体摄像头,是通过两个摄像头之间的视差(角度差)来测量距离的。我们的解决方案是使用四个宽视场的立体摄像头创建全向视图。如此就能达到足够低的5%的距离误差,同时价格更实惠,仅为500美元。”
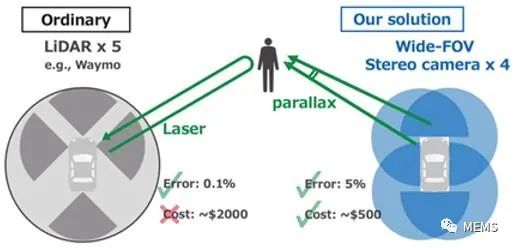
该解决方案使用四个宽视场的立体摄像头创建全向视图
Kawamata还提到日立集团的改进结果包括将RMS(均方根)从1.4像素改进到了0.65像素。“我们还进行了效果演示,通过在高尔夫球车中安装摄像头以收集图像和数据。我们最终评估的实验误差中,发现相距14 m的物体误差为8%,而理论预测误差为5%。
“为了调整我们的样机,需要消除由于相机玻璃镜筒厚度不同造成的剩余失真,提高图像分辨率,并开发出更精确的校准方法。”
SPIE光学和光子学数字论坛一直持续到8月28日,期间有1200多个按需技术演讲、300张海报以及900份论文,涉及领域包括:纳米科学与工程应用,有机光子学和电子学以及光学工程和应用。
-
摄像头
+关注
关注
60文章
4872浏览量
96508 -
adas
+关注
关注
309文章
2199浏览量
208937 -
自动驾驶
+关注
关注
785文章
13958浏览量
167272
原文标题:SPIE光学和光子学论坛 | 全向立体摄像头,助力自动驾驶
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
车载摄像头的EMC问题案例
车载摄像头的EMC案例分享

摄像头及红外成像的基本工作原理


大联大诠鼎集团推出AOV摄像头方案


基于FPGA的摄像头心率检测装置设计
摄像头各标定参数的作用






 工商网监
工商网监
评论