 RT-Thread操作系统的调度设计原理
RT-Thread操作系统的调度设计原理
要想使用好RTOS,做出更加稳定可靠的产品,必须非常清楚底层的调度原理。由于RTOS的实时性与可控性,所以只有了解了其核心部分的设计思想,才能用起来得心应手,游刃有余。本文从RT-Thread的调度器设计的运行方式上解释一下调度器的行为,从而更加深刻的理解RT-Thread操作系统的调度时机。
1.调度是什么?
调度一般就是合理的安排、协调资源,统一指挥去完成一件事,而在操作系统中,线程调度就是有多个就绪优先级的任务,找到最高优先级任务,交给CPU去运行。

RT-Thread调度器就是起到判决线程当前的优先级,然后选择当前系统中最高优先级的就绪态的线程交给CPU去管理。
调度又可以细分为两种。可打断调度:关键防止优先级倒置;不可打断调度:先来先服务,不可中断。RT-Thread 属于实时操作系统,所以其调度器实现的是可打断的调度,当有更高优先级的线程或者更重要的任务就行,则可以打断当前任务的执行状态,去执行优先级更高的任务。那么此时,调度的时机就非常的关键了。
2.调度怎么实现?
RT-Thread在创建任务的时候,会指定任务的优先级,一般来说,每个任务都有自己特定的唯一的优先级。所以内核线程对象中有不同的优先级的任务列表。
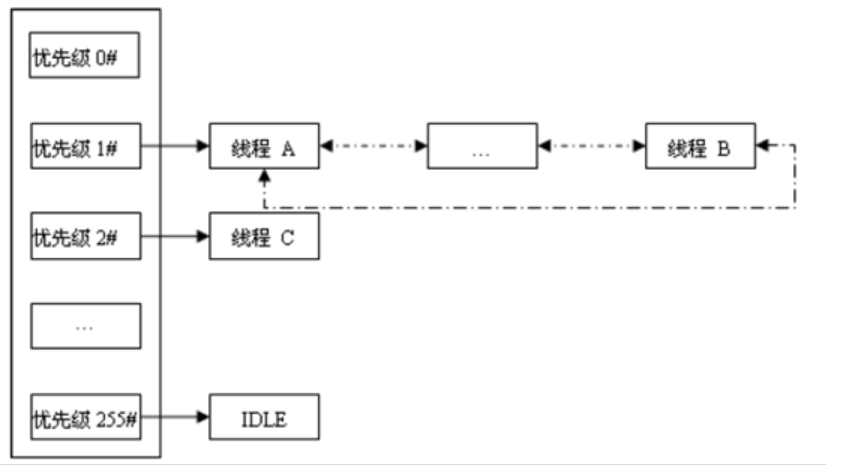
如果最大指定为32个优先级,那么可以用32位数据类型表示,每一个bit表示一个优先级就绪的状态。使用位图的优点就是速度快,而且内存占用小。
一般来说,调度去找到最高优先级的任务时,就需要去做判断。如何去找到最高优先级的任务。一般来说,有两种办法:
软件计算
硬件计算
这两种的差别仅仅在于计算效率的问题,本质目的并无差别。
而用软件计算方法寻找最高优先级有两种实现的策略:
1.遍历就绪的队列,找到最小的优先级就绪的队列,寻找的时间不确定,时间复杂度O(n)。
2.采用空间换时间的办法,事先做好一个bitmap
例如系统中最大有8个优先级,那么bitmap如下:
1constrt_uint8_t__lowest_bit_bitmap[]=
2{
3/*00*/0,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
4/*10*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
5/*20*/5,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
6/*30*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
7/*40*/6,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
8/*50*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
9/*60*/5,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
10/*70*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
11/*80*/7,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
12/*90*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
13/*A0*/5,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
14/*B0*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
15/*C0*/6,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
16/*D0*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
17/*E0*/5,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,
18/*F0*/4,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0
19};
一般每一位代表一个就绪的状态,所以__rt_ffs程序的设计如下
1int__rt_ffs(intvalue)
2{
3if(value==0)return0;
4
5if(value&0xff)
6return__lowest_bit_bitmap[value&0xff]+1;
7
8if(value&0xff00)
9return__lowest_bit_bitmap[(value&0xff00)>>8]+9;
10
11if(value&0xff0000)
12return__lowest_bit_bitmap[(value&0xff0000)>>16]+17;
13
14return__lowest_bit_bitmap[(value&0xff000000)>>24]+25;
15}
如果当前系统的线程状态为0b0110 0000,那么转换成十六进制就是0x60,根据表中的状态此时的最高优先级是5+1=6。所以可以得出系统的优先级,此时计算的复杂度为O(1)。
虽然RT-Thread 是支持同等优先级的,但是在具体的业务逻辑的设计中,在使用RTOS常用的设计方法中,一般都是要求程序的运行逻辑是可预测的,就是在程序执行的过程中,可以预测到程序下一步的动作。所以rtos中同等优先级,按照时间片轮训的这种方式设计业务逻辑的情况并不多。使用相同优先级会增加系统的业务逻辑的复杂性。
3.什么时候系统做调度?
RT-Thread 是抢占式的系统调用,所以系统什么时候去做的调度非常的关键。系统调度行为具体又分为主动调度和被动调度两种。
3.1 任务主动block
当A线程在正常运行时,主动放弃CPU的使用权,比如去执行rt_thread_delay或者等待一个IPC消息时,当前线程会主动放弃CPU资源,此时去系统中寻找已经就绪的最高优先级的线程进行调度。

这种方式应用的场景比较丰富,比如当前线程没有获取到资源时,需让出CPU的使用权,或者事情做完了,主动让出CPU的使用权,这就是系统做调度的时机。
A线程的优先级要高于B线程的优先级,所以在A放弃CPU使用权后,已经就绪的最高优先级线程B就开始执行了。
3.2 被更高优先级的任务唤醒
这种方式就是当比当前运行线程的优先级高的线程处于就绪态时,高优先级的就绪态线程会被唤醒,低优先级线程将暂停运行,此时会调度到比当前线程更高的优先级线程中去。
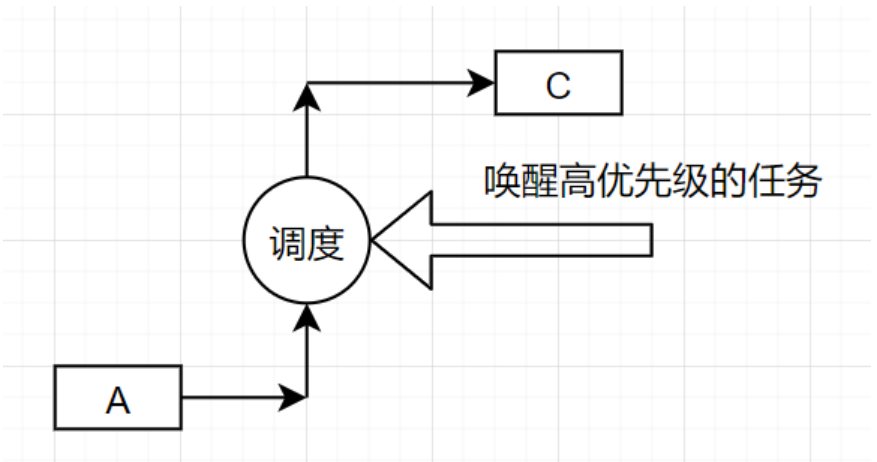
按照理解A线程是正在运行的线程,此时更高任务优先级的线程C就绪处于就绪状态了。比如创建了一个比A优先级更高的C进程,并startup C线程,此时会执行rt_schedule()将线程切换到优先级更高的C线程。此时A线程运行状态以及处理器寄存器状态压栈,更高优先级的C线程的状态以及处理器寄存器状态出栈,并且开始运行C线程。
3.3 yield放弃cpu使用
首先理解一下什么是yield,解释成让出,放弃比较合理。该出让只针对于同等优先级的线程。

这种情况只适用于A线程的优先级等于B线程的优先级的情况。因为RTT支持同等优先级的方式创建线程,相同的优先级的切换是靠时间片轮询来进行的。所以,当A线程正常运行的时候,如果执行了yield函数,那么只相当于将A线程的时间片消耗完,此时同等优先级的D线程开始运行。 由于在RTOS中,需要的是完成任务的确定性与可靠性,同等优先级的情况比较有限,所以这一块应用的不多。
3.4 中断中执行调度
以上的三种属于主动进行调度的过程,其系统的执行流程都是可以预测的,但是中断去执行调度却是比较特殊。是被动调度。

这种方式是在中断中执行调度的,当A线程正常运行时,此时来了一个中断,由于中断的优先级是高于线程的。所以,中断处理事情,如果在中断中执行了调度函数,那么在中断退出后,将直接切换到当前系统中更高优先级的线程去运行。如果如果当前系统的最高优先级还是A,那么中断退出后,执行的最高优先级线程依然是A。若存在线程E线程优先级高于A并且处于就绪状态,此时,中断退出后,切换到E线程去执行。
4.调度做了哪些事情?
系统进行调度的时候做了哪些事情?
第一步:查找当前系统中当前以及就绪的最高优先级的线程,若有高于当前运行系统运行的线程栈则执行线程切换
第二步:关闭中断,将系统当前运行状态以及处理器的寄存器压入栈空间
第三步:找到需要运行的线程的PC指针,并找到栈起始处弹出栈空间中的寄存器状态
第四部:打开中断,执行异常ret,让系统恢复执行
此时,就切换到已经就绪的更高优先级的线程去运行了。
5.总结
RT-Thread 线程的调度器是整个系统的灵魂,整个操作系统在运行过程中何时切换线程、什么情况下去处理任务,以及做更高效的业务逻辑的应用都离不开系统调度。掌握了调度器运行的规律,并且合理的使用线程调度时机,可以设计出更加稳定可靠的产品。通过阅读代码,就能预测程序下一步的执行动作。真正的做到手中有粮,心中不慌。
-
cpu
+关注
关注
68文章
10944浏览量
213827 -
操作系统
+关注
关注
37文章
6939浏览量
124129 -
实时操作系统
+关注
关注
1文章
200浏览量
30937 -
RT-Thread
+关注
关注
31文章
1318浏览量
40780 -
调度器
+关注
关注
0文章
98浏览量
5345
原文标题:RT-Thread的线程调度与管理分析
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RT-Thread嵌入式操作系统专业培训班来上海啦!

RT-Thread嵌入式操作系统专业培训班登陆郑州!
RT-Thread操作系统应用开发寒假师资培训
RT-Thread联合河北大学发起嵌入式操作系统专业班-保定站
【本周六-深圳】RT-Thread嵌入式操作系统专业培训班正式开班
新书发布——《RT-Thread嵌入式实时操作系统内核、驱动和应用开发技术》
【好书推荐】RT-Thread设备驱动开发指南
RT-Thread内部机制大揭秘,带你深入操作系统内核

睿赛德科技CEO熊谱翔 ——基于RT-Thread操作系统的安全车控系统实践
RT-Thread 新里程碑达成——GitHub Star 破万!
开发者分享 | 基于先楫RT-Thread BSP,使用CLion开发应用

实时操作系统之RT-Thread及FreeRTOS
新书发布——《实时操作系统应用技术:RT-Thread与ARM编程实践》
RT-Thread荣获“最具影响力IoT操作系统奖”





 工商网监
工商网监
评论