 基于平行运动学设计的N35压电偏转镜的结合和特点分析
基于平行运动学设计的N35压电偏转镜的结合和特点分析
N35系列压电偏转镜,是一款定制型压电精瞄镜,与其他压电偏转镜不同的是,它具有方形的外形结构。该结构使其更易于安装固定。
特点
•θx、θy二维偏转 •大角度偏转达50mrad •闭环分辨率达2μrad •可选配闭环传感器
结构简介
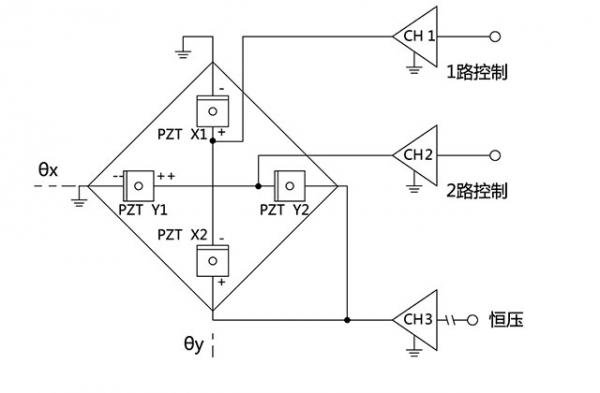
N35压电偏转镜(两轴运动)是基于平行运动学设计,具有共面轴及移动面。四个执行机构(PZT压电陶瓷驱动器)以90°角平分放置,成对的差分控制分布。两对差分驱动压电促动器在较大温度范围内提供最高可实现的角度稳定性。它的偏摆运动是由两对压电促动器以推拉模式来实现,采用桥式连接电路控制。
高可靠性及长寿命、高稳定性及动态性
N35系列压电偏转镜系统内部装配带有预紧力的高可靠性压电促动器,被集成在经过FEA建模分析的铰链导向系统。压电促动器为叠堆共烧型压电陶瓷,可提供更好的稳定性及可靠性。压电促动器、导向机构及传感器是免维护的,不易损坏且提供超高的可靠性。
先进的铰链/杠杆设计将惯性最小化,允许50mrad的大角度俯仰/偏转范围(可将光束偏转 100mrad),且具有非常快的响应速度,在毫秒级范围。
除了大偏转角度及高动态,N35还提供了微弧度的分辨率。内部集成高分辨率、全桥的应变传感器(SGS)实现了精确的位置控制,具有优异的重复定位精度,通常为满行程的0.02%。
N35压电偏转镜角度测量
技术参数
型号:N35.T40S/K
运动自由度:θxθy
偏转角度@120V:40mrad(≈8250秒)
偏转角度@150V:50mrad(≈10300秒)
传感器类型:SGS/-
闭/开环分辨率:2/1 µrad
闭环线性度:0.05%F.S.
闭环重复度:0.02%F.S.
空载谐振频率:1300Hz
带载谐振频率(12.7mm×3mm镜片):1050Hz
闭/开环阶跃时间:1.4/1ms
静电容量:14.5μF
材质:钛合金
重量:223g
E70.D3S压电控制器为小体积压电控制器,具有3个输出通道,可含一路恒压输出,非常适于驱动N35系列压电偏转镜。
责任编辑:gt
-
传感器
+关注
关注
2551文章
51099浏览量
753599 -
控制器
+关注
关注
112文章
16361浏览量
178068 -
分辨率
+关注
关注
2文章
1063浏览量
41930
发布评论请先 登录
相关推荐
N25.T6K小体积压电马达偏摆台


电磁轨迹预测分析软件
电磁轨迹预测分析系统设计方案
plc可以进行运动控制吗
S31系列小体积压电偏转镜应用于高速、高精度光路偏转调节!

几种不同的光束偏转系统对比
压电偏转镜在激光快速扫描系统控制中的应用


机器人运动学中的非完整约束与运动模型推导






 工商网监
工商网监
评论