 两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
$TORQMON[n]各轴的负载保护因数
程序模式下扭矩监控的电流因数(力感应扭矩)
如果机器人与物体碰撞,则机器人控制器会增加轴转矩以克服阻力。这可能会损坏机器
人,工具或其他物体。变量$ TORQMON []包含程序模式下轴转矩的当前公差范围。
$ TORQMON [轴号] =因子,默认值200,过载电流的百分比,即200%.
因此我就想如果我想在KUKA 机器人初期调试工作过程中减少互锁区设置失误而碰撞的损失,我们可否给变量$ TORQMON 减小。
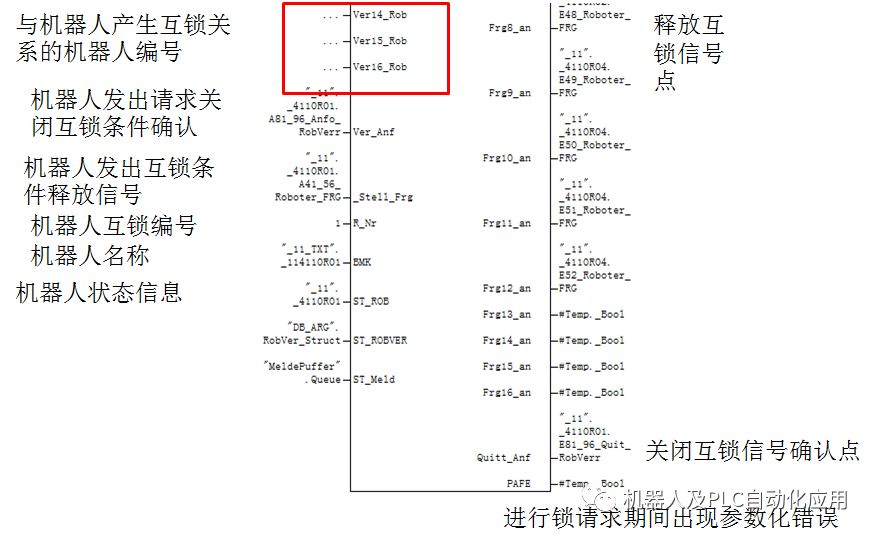
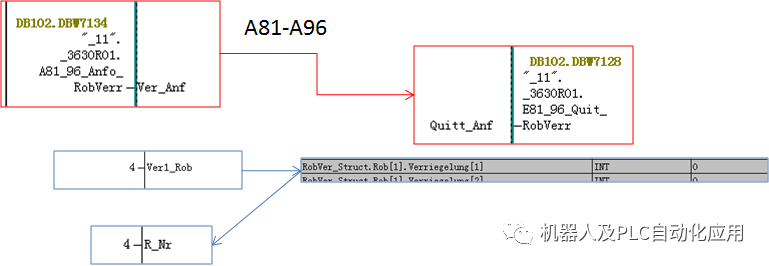
VASS标准的A/E41-56机器人互锁信号,A/E81-96用于机器人与PLC确认关闭互锁信号.
每个机器人标准有16个锁定命令可用,这些命令已永久分配给I / O。
在在线驾驶条件下必须查询相应的锁定输入。
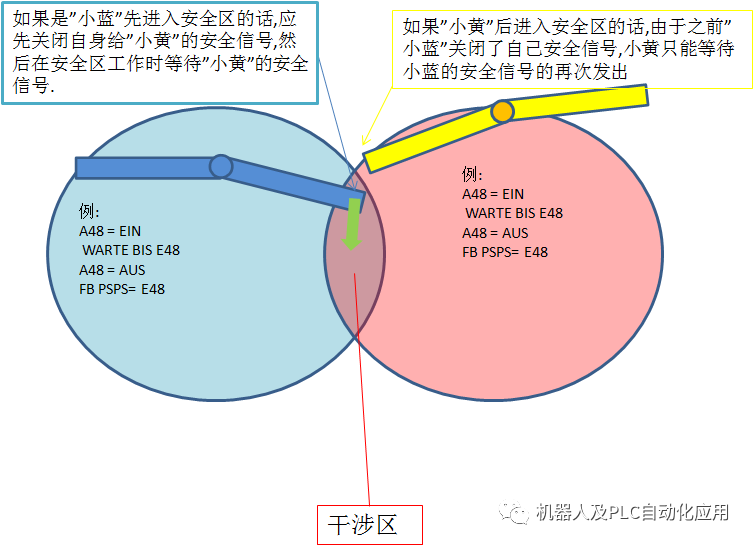
1.进入安全区时:
如果是”小蓝”先进入安全区的话,应先关闭自身给”小黄”的安全信号,然后在安全区工作时等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出
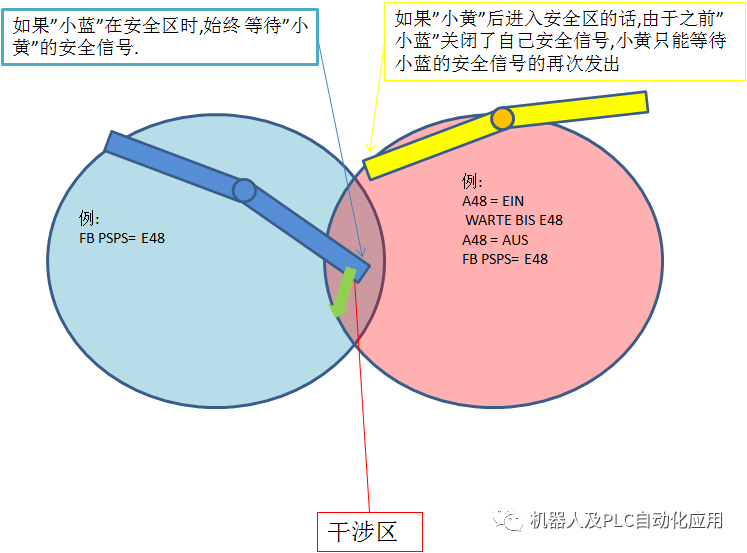
2.在安全区时:
如果”小蓝”在安全区时,始终 等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出.
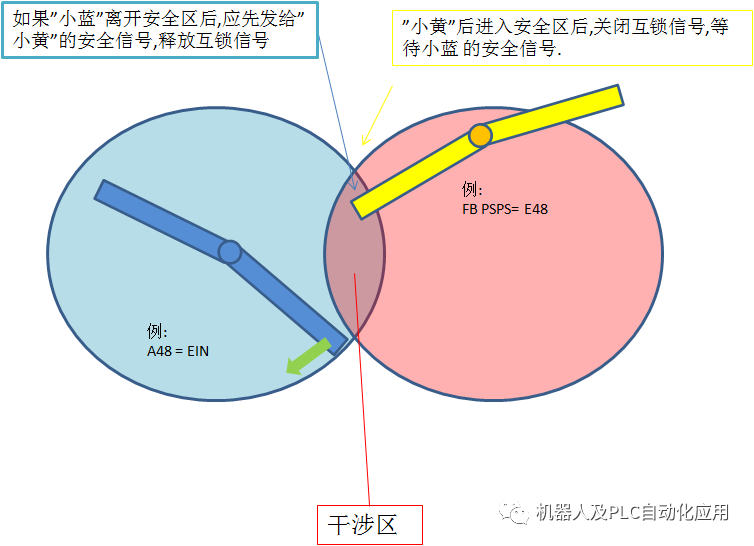
3.离开安全区时:
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.
”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号.
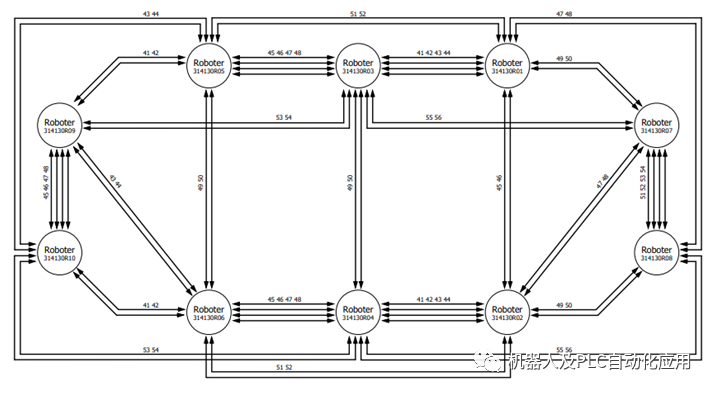
PLC对机器人干涉区的控制:
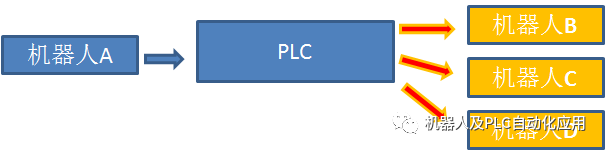
VASS 标准使用的互锁标准:互锁示意图,设定机器人之间互锁所使用的IO范围.
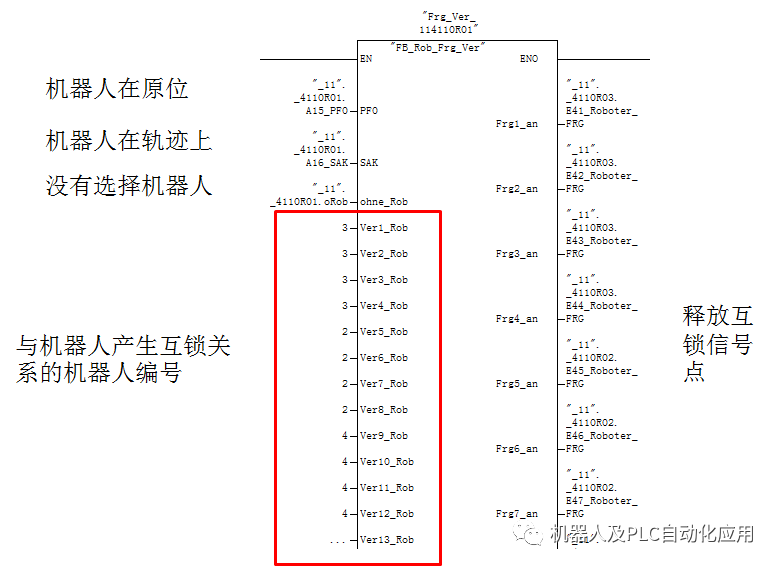
FB207机器人互锁信号控制:
可以设置机器人在原位时默认发出互锁释放信号.
-
机器人
+关注
关注
211文章
28409浏览量
207025 -
变量
+关注
关注
0文章
613浏览量
28365 -
过载
+关注
关注
2文章
110浏览量
20092
原文标题:前几天两个机器人相撞了,所以想聊聊防撞区和机器人轴过载保护
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
焊接机器人常见故障及排查

开关显示过载什么原因造成的
开关电源过载保护后怎样恢复
什么是电机过载?它有哪些过载保护方法?
伺服驱动器过载保护怎么调
伺服驱动器过载时间是累计的吗
重启逆变电源过载怎么做,是否接近过载

ADXL1004过载量程问题求解
六轴焊接机器人的操作流程

巡检机器人有哪些功能和作用?

电机过载故障成因 电机过载故障怎么消除?
如何使用PLC实现过载报警控制





 工商网监
工商网监
评论