 机器人焊接MAKRO80程序分析
机器人焊接MAKRO80程序分析
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS !E16 & E23
E16通过对比点号确定机器人停止在具体哪个焊接点上(S-Punkt = 897)
4: Tech_ EZSP Zange = Nr1 ProgNr =99 Offset = 0 [1/10 mm] Weg = 0 [1/10 mm] S-Punkt = 897 Fzg-Typ = 61 EIN
5: bin2 ( EIN ) = 93平衡缸
6: WARTE BIS !E129 + E26E129不带力
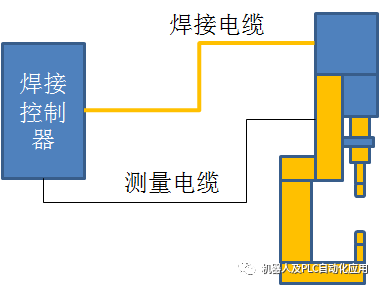
7: SPSMAKRO80 = EIN开始焊接
ProgNr =X的含义:zs焊钳程序号的设置
X=1-10用于压力的测量 (ZS1-ZS4) X=11-20用于检查电流测量(ZS1-ZS4) X=21-30用于更换电极帽之前的力夹紧(ZS1-ZS4) X=31-40用于电极帽的铣削(ZS1-ZS4) X=41-50用于电极帽的首次铣削后的测量焊接 (ZS1-ZS4) X=51-60用于电极帽的正常铣削后的测量焊接 (ZS1-ZS4) X=98 手动功能 X=99 选择焊接点 X= 100-255 选择带零件监控的焊接点程序
S-Punkt =Y的含义:sk焊接控制器的焊点号的设置
Y=1-10用于压力的测量 (ZS1-ZS4) Y=11-20用于检查电流测量(ZS1-ZS4) Y=21-30用于更换电极帽之前的力夹紧(ZS1-ZS4) Y=31-40用于电极帽的铣削(ZS1-ZS4) Y=41-50用于电极帽的首次铣削后的测量焊接 (ZS1-ZS4) Y=51-60用于电极帽的正常铣削后的测量焊接 (ZS1-ZS4) Y= 100–65534 焊点号
PAR2 -A769-A777 焊钳程序号
PAR3 ---保存偏差范围—
PAR4 --焊接结束后返回的位置值
PAR5 -A801-A816 BOSCH程序号
PAR5 -A97-112 给PLC的进程点号
PAR6 -A777-A784 类型号给焊钳
PAR6 -A817-A824 类型号给BOSCH
;FOLDMakro Anfang ;%{PSE}%MKUKATPVW
BOOLADV
;interface to basic routines
EXT BAS(BAS_COMMAND :IN,REAL :IN )
;interface to VW-standard routines
EXTVW (VW_COMMAND:IN, BOOL: IN, REAL:IN, REAL:IN, REAL:IN, REAL:IN, BOOL :IN, E6POS :IN )
;interface select routine
EXTFCTINT SELECT (SUBTYPE :IN,INT :IN,BOOL :IN,ARI_TYP :IN,INT :IN,BOOL_TYP :IN,INT :IN,BOOL :IN)
SPS_N=-1
;FOLD;%{H} %MKUKATPVW
IFVARSTATE ("ADV") <> #INITIALIZED THEN
ADV=FALSE
ENDIF
IF(NOT ADV) THEN
;ENDFOLD
;ENDFOLD
;FOLD-- EZ1/SP1 气伺服焊接程序 -- ;%{E}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- EZ1/SP1 Schweissen --, 3: VW_COMMENT
;ENDFOLD ;ENDFOLD
;FOLD-- F118 = 伺服焊钳总故障 ;%{E}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- F118 = Sammelstoerung EZ1/SP1 an BMS --, 3: VW_COMMENT
;ENDFOLD
;FOLD-- F119 = 焊接控制器总故障;%{E}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- F119 = Sammelstoerung SK1 an BMS --, 3: VW_COMMENT
;ENDFOLD
;FOLDA129 = EIN ---给PLC进程信号, A129进程激活

用来控制发出A20/A19
1.作用1关闭发出 A20等待PLC反馈
$OUT[129]= TRUE
;ENDFOLDA19等待机器人行驶条件
-
机器人
+关注
关注
211文章
28524浏览量
207553 -
焊接
+关注
关注
38文章
3181浏览量
59899
原文标题:不一样的VASS标准,机器人焊接MAKRO80程序分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
焊接机器人焊接工艺了解吗?管道焊接机器人可视焊缝追踪系统介绍
焊接机器人与传统焊接的区别
焊接机器人编程技巧与注意事项
焊接机器人拖拽轨迹怎么设置

焊接机器人示教模式怎么设置

FMEA在焊接机器人研发中的应用
焊接机器人怎么调焊接速度

焊接机器人调试技巧有哪些

焊接机器人的应用领域有哪些
六轴焊接机器人的操作流程

焊接工艺对机器人的要求有哪些
机器人焊接与人工焊接对比分析

视觉机器人焊接的研究现状

焊接专机与焊接机器人哪个好

机器人焊接技术的应用与发展前景





 工商网监
工商网监
评论