 激光雷达(LiDAR)是实现汽车自动驾驶所必不可少的距离探测器
激光雷达(LiDAR)是实现汽车自动驾驶所必不可少的距离探测器

激光雷达(LiDAR)是实现汽车自动驾驶所必不可少的距离探测器。高精度和长距离实时测量汽车与周边物体的距离,才能保证驾驶更安全与智能化。

激光雷达工作原理(Td为发射和接收脉冲之间的时间差) 单次激光脉冲做得越窄,距离测量精度就越好;同时,提高脉冲的幅值,才能探测更远距离。这就给LiDAR生成电容提出了很高的要求:
不同温度,电压下容值稳定性
合适的容值(100pF-1nF)
高额定电压(>80V)
汽车级(AEC-Q100)
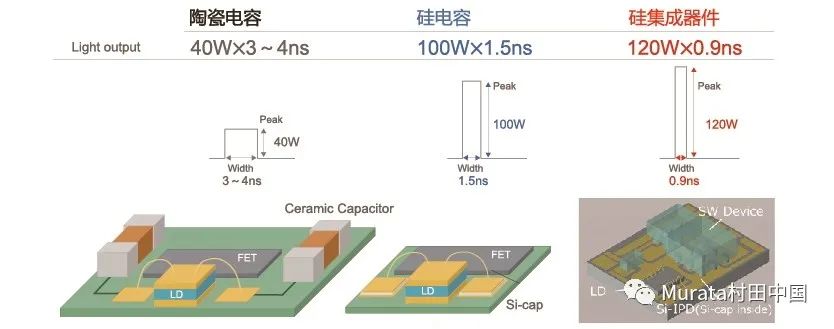
MLCC电容器难以满足汽车LiDAR的技术要求 另外,为了保证对行人视力的绝对安全,对应于高峰值功率,LiDAR的发展趋势是更加窄的脉宽,这就需要更低的电容ESL。 除了上述性能与安全需求,未来的车载激光雷达趋势还要考虑的因素包括:
平衡可靠性、电子组装工艺、成本;
缩小尺寸以满足全方位多探测器应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
探测器
+关注
关注
15文章
2772浏览量
76048 -
激光雷达
+关注
关注
982文章
4548浏览量
197083 -
自动驾驶
+关注
关注
794文章
14988浏览量
181502
原文标题:PPT分享 | 超低ESL高可靠汽车激光雷达(LiDAR)探距的两种硅器件方案
文章出处:【微信号:murata-eetrend,微信公众号:murata-eetrend】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
自动驾驶中激光雷达搭载越多融合越困难吗?
的覆盖范围,但也带来了一个问题,那就是传感器多了,数据处理起来会打架吗?系统会不会因为信息量太大而产生严重的延迟? 为什么自动驾驶需要多个激光雷达? 很多智驾车辆上,都会在车顶安装单颗激光雷达

4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠
高阶自动驾驶的核心竞争力,在于全天候、全场景下的精准感知与可靠决策。传统ToF激光雷达虽已实现厘米级三维成像,但在动态目标测速、抗干扰、远距离探测

FMCW和ToF激光雷达,哪种更适合自动驾驶?
的话题。其中ToF和FMCW这两种测距方式常被拿来讨论。它们都能让激光雷达“看见”距离,但底层原理、性能边界以及对自动驾驶系统的意义却并不相同。 什么是ToF和FMCW? 自动驾驶系统
自动驾驶激光雷达会伤害人体吗?
[首发于智驾最前沿微信公众号]随着自动驾驶技术的普及,激光雷达的使用也越来越多。现在我们很容易就看到搭载激光雷达的车辆在路上行驶。很多人听到“激光”后总会有一种担忧,害怕

如何为自动驾驶汽车选择一款合适的激光雷达?
[首发于智驾最前沿微信公众号]在很多自动驾驶的车辆上,都加装了激光雷达(LiDAR),激光雷达是一种用激光测

自动驾驶里的激光雷达有何作用?
[首发于智驾最前沿微信公众号]激光雷达(LiDAR)是一款把光当“尺子”来量距离的一类传感器,在自动驾驶里负责“看清三维形状和


决定自动驾驶激光雷达感知质量的因素有哪些?
一个激光雷达是否适合自动驾驶,基本上取决于它在距离(range)、角度/点云分辨率(resolution)、以及在现实世界复杂条件下的鲁棒性(robustness)。

自动驾驶只用激光雷达进行感知会有哪些问题?
[首发于智驾最前沿微信公众号]自动驾驶依赖激光雷达(LiDAR)技术已成为行业内的主流选择之一。激光雷达通过发射和接收激光脉冲,绘制周围环境
自动驾驶激光雷达之间会相互干扰吗?
下这个问题,若有不足之处,还欢迎大家留言区评论。 对于自动驾驶汽车来说,搭载在车顶和车身周围的激光雷达(LiDAR)已成为环境感知的“眼睛”。激光雷

激光雷达在自动驾驶中为何不可替代?
109.6%。在很多车企不断追求纯视觉的当下,为何激光雷达的销量反而“逆势”增长?激光雷达在自动驾驶中为何不可替代? 其实环境感知作为自动驾驶

激光雷达(LiDAR)技术方案与工作原理全解析
在自动驾驶、智慧城市、机器人导航等众多前沿科技领域,激光雷达(LiDAR,Light Detection and Ranging)正扮演着愈发关键的角色。它凭借高精度、高分辨率的探测能

自动驾驶激光雷达:原理、类型与应用梳理
1.什么是激光雷达 激光雷达LiDAR的全称为Light Detection and Ranging 激光探测和测距。




评论