 基于VxWorks操作系统实现PC/104-CAN适配卡的驱动系统设计
基于VxWorks操作系统实现PC/104-CAN适配卡的驱动系统设计
来源:单片机与嵌入式系统应用,作者:解月工,秦龙勇,谢拴勤,彭卫东
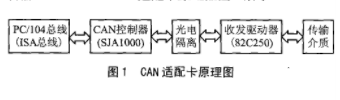
PC/104-CAN适配卡主要由CAN控制器(SJA1000)、光电隔离(6N137),收发驱动器(82C250)及译码电路组成。编程主要了解的是控制器SJA1000。CAN适配卡原理如图1所示。
2 CAN地址译码和中断选择
系统104主板的CPU为486DX,其对接口板访问有两种方式:内存映射和I/O访问。I/O寻址采用专门的指令,每次只能传送单个字节。内存映射方式可以访问较大的地址空间并且指令丰富,便于实现快速交换数据。本文讨论的CAN卡采用存映射模式工作,与486DX接口是104总线,它与 ISA总线兼容。对于Intel X86体系的CPU,ISA可以映射的空间为0xC8000~0xEFFFF。使用比较器和地址选择开关组成可选端口地址译码电路,通过开关选通内存映射基地址(C8000H、C9000H、CA000H、…、EF000H),以避免与其它器件冲突。CAN偏移地址分配如下:
00~FFH SJA1000的寄存器;
100H~1FFH 对该范围内的任意地址进行写操作,均可导致CAN硬件复位。
SJA1000的INT引脚通过跳线选择IRQ3~7、IRQ9~12或IRQ15中的一个,避免与其它的适配卡冲突。
3 PC/104-CAN适配卡驱动实现
3.1 VxWorks驱动概述
VxWorks操作系统有两种方式实现驱动。第一种方式是,把设备驱动程序作为独立任务实现,直接在顶层任务中实现硬件操作,完成特有专用的驱动程序。第二种方式是,VxWorks的I/O系统将设备程序作为内核过程实现。这种方式便于实现I/O子系统的层次模型,便于文件系统一起把设备作为特殊文件处理,提供统一的管理、统一的界面和统一的使用方法,并把设备、文件及网络通信组织成为一致的更高层次的抽象,为用户提供统一的系统服务和用户接口。我们和这种驱动方式。
作为I/O系统和硬件设备之间的连接层,VxWorks驱动就是屏蔽硬件操作,为I/O系统提供服务。实现一个完整的驱动,必须了解VxWorks下I /O的三个基本元素:File、Driver和Dervice。File是为用户提供访问设备的统一接口;Driver是实现具体的基本控制函数,也就是实现I/O系统所需要的接口;而Device则是一个抽象的硬件设备,是一系列的结构体、变量和宏定义对实际物理设备的定义。一般而言,实现一个驱动应该有三个基本的步骤:①用编程语言完成对实际物理设备的抽象;②完成系统所需要的各类接口及自身的特殊接口;③将驱动集成到操作系统中。之后还有一些调试工作。
3.2 VxWorks I/O系统驱动程序框架
VxWorks为各种设备(包括字符设备、块设备、虚拟设备及网络设备)提供统一的访问接口,包括七种基本的I/O函数:open(filename、flags、mode),create(filename、flags),read(fd、&buf、 nBytes),write(fd、&buf、nBytes),ioctl(fd、command、arg),close(fd)及 remove(filename)。I/O系统所起的作用就是,把用户请求分配到与设备对应的驱动例程中去。VxWorks系统中有一个驱动程序列表,其形式如表1所列。
表1 设备驱动列表(调试时可利用iosDrvShow()查看)

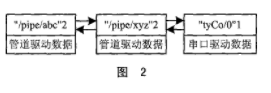
I/O系统的可动态调用iosDrvInstall()函数将设备的驱动例程(即XXOpen()、XXClose()、XXRead()等)加入到设备驱动列表中,如图2所示。
同样,系统中有一个设备列表,每个设备对应于设备列表中的一项,每一项包括设备名称和设备驱动号,同时包括一个设备描述的结构。该结构第一个变量是DEV_HDR类型的变量DEV_HDR。
DEV_HDR的定义如下:
Typedef struct
{
DL_NODE node; /*设备列表节点*/
short drvNum; /*驱动号码*/
char *name; /*设备名*/
}DEV_HDR;
系统调用iosDevAdd(),可以将设备加入到设备列表中。系统中将驱动和设备联系起来的就是文件描述符列表,每个文件描述符列表除了包括驱动号、设备ID外,还包括文件名、可用标志和指向DEV_HDR的指针。系统每次成功执行open(),返回一个文件描述符,这样对于设备的 read()、write()及ioctl()就可以通过文件描述符进行。
文件描述符表(调试时调用iosFdShow()查看)如下:

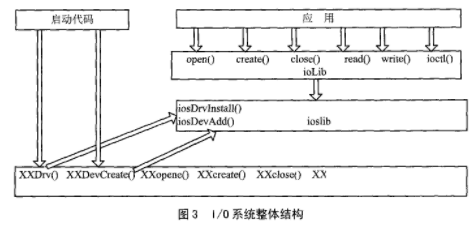
I/O系统的整体结构如图3所示。系统启动时(一般挂接在usrroot()),XXDrv()和XXDevCreade()便将设备及其驱动加入相应的列表中。
3.3 设备驱动程序的访问过程
下面以CAN驱动程序为例,说明驱动程序的访问过程。(假定设备名“/can/1”并且以CAN设备驱动程序为例,上述中的XX在这里用Can代替。)
①fd=open(“/can/1”,O_RDWR,0644)
②I/O系统在设备列表中寻找设备名为/can/1的设备项,找到相应的设备驱动号。
③I/O系统在文件描述符中保留一个文件描述符空间。
④I/O系统在设备驱动列表中找到对应的CanOpen(CAN_DEV*PCAN_DEV,UBYTE*remainder,int flags),该驱动例程返回设备描述符的指针。
⑤I/O系统将设备描述符的指针存储在文件描述符列表的Device ID,同时将对应的设备驱动号存储在文件描述符的Driver num项。最后I/O系统返回该描述符项的索引(即为fd)。
⑥这样应用程序中的read()和write()等函数调用就可以根据fd找到相应的设备驱动号,进而找到相应的驱动例程。
4 CAN驱动程序的实现
CAN驱动程序的实现即是完成下面七个函数的编写。下面简要介绍其完成的功能,并用伪指令进行说明。
int drv_num; ;/*驱动号码*/
typedef struct {
DEV_HDR pCANHDR; /*这个数据结构必须放在设备描述符的最初部分*/
/*其余与驱动有关数据*/
}CAN_DEV; /*CAN设备描述符*/
CAN_DEV can_chan_dev;
STATUS CanDrv(void){
完成驱动的一些初始化;
intconnect(); /*连接所选的IRQ与中断处理函数*/
sysIntEnablePIC(); /*486DX允许中断*/
drv_num=iosDrvInstall(CanOpen,NULL,CanOpen,CanClose,CanRead,CanWrite,CanIoctl);/*将设备驱动例程装入设备列表中*/
}
/*iosDrvInstall()将设备的CAN驱动例程加入设备驱动列表中,7个参数为7个驱动例程的进入点(entry point),如果没有某个例程,则传递NULL。*/
STATUS CanDevCreate(){
完成一些设备初始化
iosDevAdd (&Can_chan_dev.pCANHDR,“can0”,drv_num);/*将设备放入设备驱动列表中*/
}
int CanOpen(CAN_DEV *pCan_Dev,UBYTE *remainder,int flags){
CAN卡硬件复位
CAN卡关中断
CAN卡进入软件复位模式
设置CAN卡工作寄存器,如接收码寄存器和屏蔽码寄存器等
CAN卡开中断和进入操作模式
Return((int)pCan_Dev); /*注意必须返回设备描述结构指针*/
}
int CanRead(int CAN_DEV_ID,UBYTE * buf,int nBytes){
等待信号量(该信号量由中断处理例程释放)
从接收缓冲区读取数据
释放接收缓冲
返回接收数据数量
}
int CanWrite(int CAN_DEV_ID,UBYTE* buf,int nbyte){
查询发送缓冲是否可用
向发送缓冲区写数据
命令发送
查询发送完成标志
返回发送数据数量
}
void interrupt_handle_routin(int arg){
处理中断事件
发送(释放)信号量
}
限于篇幅,其它函数略。
5 CAN驱动调试
硬件驱动的调试是件十分麻烦的事,经验十分重要。这里简要介绍几个帮助调试的函数。
①可以调用iosDrvShow()、iosDevShow()及iosFdShow()查看相关内容,判断并将驱动及设备中入相应列表。
②使用logMsg()现实相关内容,以定位错误。
初期调试,示波器和信号灯是非常有用的,可以确定硬件的工作状况,从而有助于发现程序中的错误。
6 小结
笔者采用两种方式完成了CAN卡驱动。相对于第一种(笔者亦完成),第二种方式——VxWorks的I/O系统将设备程序作为内核过程实现,大大减少了系统的开销,实时性和可靠性有了很大的提高,并且为用户提供了统一的接口,使用十分方便。
开发驱动程序,辅助工具是非常有用的。Windows下的开发工具就比较多,而在VxWorks下开发驱动的工具相对较少。Windriver 是一款不错的开发工具,可以开发VxWorks下的驱动程序(也可以开发其它操作系统下的驱动程序)。正确、熟练地使用这些辅助工具,会使开发工作事半功倍。
责任编辑:gt
-
驱动器
+关注
关注
52文章
8233浏览量
146298 -
控制器
+关注
关注
112文章
16347浏览量
177928 -
操作系统
+关注
关注
37文章
6816浏览量
123315
发布评论请先 登录
相关推荐
什么是VxWorks操作系统
VxWorks下PC/104-CAN驱动程序设计
Linux操作系统实现了在PC104 上的裁减和移植
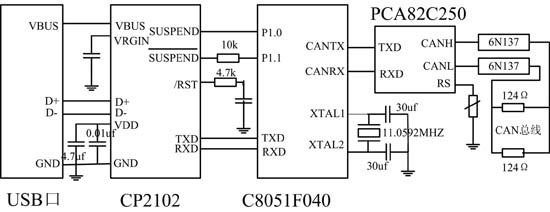
基于CP2102高速USB2.0-CAN适配卡的设计
基于WinCE环境的CAN适配卡驱动程序的设计与实现
PC104总线实现VxWorks板载支持包BSP

基于WinCE环境的CAN适配卡驱动程序的设计与实现
VxWorks操作系统下CompactPCI总线驱动程序的设计






 工商网监
工商网监
评论