 KUKAC4如何通过逆向启动键进行执行反向运行?
KUKAC4如何通过逆向启动键进行执行反向运行?
逆向启动键。用逆向启动键可逆向启动一个程序。程序将逐步运行。
行反向运动 (通过逆向启动键):
如果应优化运动的序列并且为此目的重新示教各个点,则通过逆向启动键经常使用反向运行。用户沿轨迹反向运动,直到到达待修正的点。在重新示教此点之后,必要时继续向后运行,以修正其他点。
后退时,自动采用程序运行方式 #BSTEP。
$PRO_MODE程序运行模式#BSTEP后退步进: 连续后退执行到程序的开始.
后退时不能进行轨迹逼近或摆动。如果前行时这些点已被轨迹逼近或摆动,则返回轨迹将不同于前行轨迹。由此在逆向启动后,尽管机器人完全没有脱离前行轨迹,但它可能必须先执行一次 BCO 运行。
BCO 运行必须作为 LIN 或 PTP 运动从实际位置移动到目标位置。速度已自动下降。无法确保预见运动过程。在 BCO 运行时观察运动,以便有发生碰撞的危险时机器人可及时停止。
操作步骤:
1.按住确认开关,直至状态栏 “ 驱动器已准备就绪 ” 显示:
2. 按下并且按住逆向 (后退)启动键。
如果机器人已经位于后退轨迹上,则即刻后退。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28419浏览量
207108
原文标题:KUKAC4通过逆向启动键执行反向运行
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LIDAR激光雷达逆向建模能用到revit当中吗
LIDAR激光雷达逆向建模是一种利用激光雷达技术获取物体表面数据,然后通过计算机软件进行建模的方法。在建筑行业中,这种方法可以用于建筑物的三维建模、结构分析、施工模拟等。Revit是一款专业的建筑
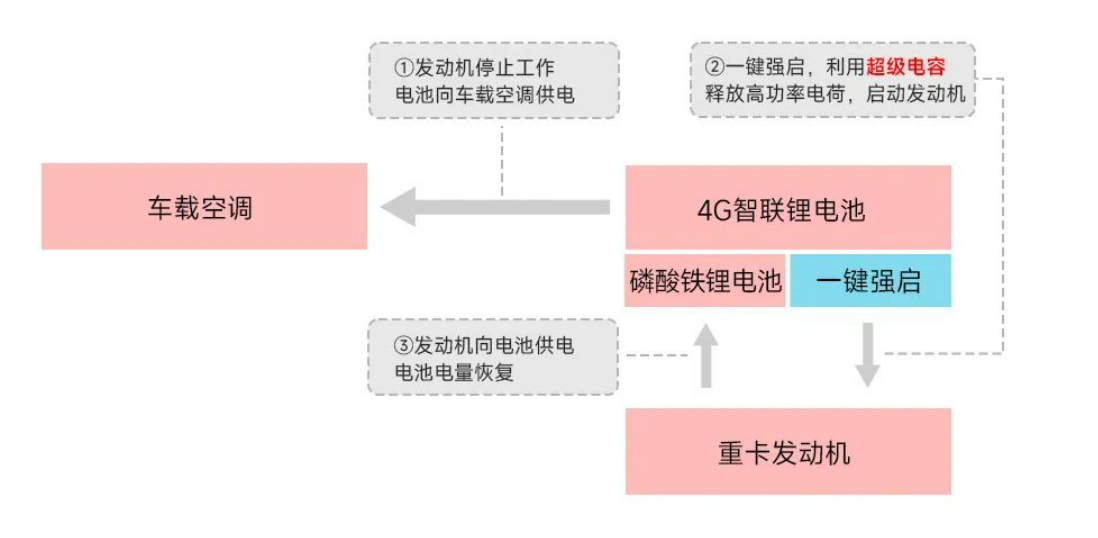
AMEYA360:永铭超级电容助力4G智联锂电“一键强启”功能
锂电替代了传统铅酸电池,并加入了“一键强启”功能。当电瓶电量低于10%,4G智联锂电的“一键强启” 功能通过释放智联锂电中的超级电容储存的电荷,快速
启动绕组与运行绕组的区别是什么
电机是现代工业中不可或缺的动力设备,其性能和效率直接影响到整个系统的运行效果。电机的绕组设计是电机性能的关键因素之一,不同的绕组方式会对电机的启动性能、运行效率、功率因数等产生重要影响。 启动
车架三维扫描逆向建模大尺寸部件stl建模曲面逆向设计方案
三维扫描技术在汽车设计、制造、质量检测等多个环节中都发挥着关键作用。汽车车架三维扫描建模是汽车工程领域中的一项重要技术,通过CASAIM高精度的三维扫描设备,对车架表面进行快速扫描,获取车架的精确三维数据,进而通过专业


STM32H747用DTCM-ram启动,跳转之后app程序无法运行的原因?
M4的启动地址为0x08100000,通过查看memory 看到这2个app已经写到指定地址,跳转程序也是执行了,向量表也修改了,跳转之前把Dcache关闭了,用DTCM-ram
发表于 04-01 07:19
ZR执行器的抗干扰能力:稳定运行的关键
ZR执行器的抗干扰能力:稳定运行的关键-速程精密 在工业自动化领域,ZR执行器作为一种重要的终端设备,其性能的稳定性对于整个自动化系统的运行至关重要。而抗干扰能力作为ZR

你想轻松掌握PCB逆向研发原理图吗
PCB抄板,业界也常被称为电路板抄板、电路板克隆、电路板复制、PCB克隆、PCB逆向设计或PCB反向研发。 即在已经有电子产品实物和电路板实物的前提下,利用反向研发技术手段对电路板进行
如何使用PSoC 61进行安全启动?
我们知道所有关于安全启动的文档都是基于 PSoC 62、63 或 64 的。
因为安全启动机制包括 M0+ 和 M4。
我们想知道如何使用 PSoC 61 进行安全
发表于 01-30 07:51
DFU PSOC4 Bootloader无法启动应用程序怎么解决?
,使用MDT 3.1生成,我有一个引导加载程序,它允许通过DFU Tool进行传输,但没有返回任何错误,但是可 引导加载程序永远不会自行 启动。
当我使用 MDT 2.4 生成的引导加载程序时,MDT
发表于 01-30 07:43
如果使用Dual bank模式,CM0+和CM4的程序是否同时运行,如何避免中断的相互干扰?
设是否需要重新初始化?
CM4程序运行起来后,CM0+的工作状态是继续执行还是停止工作?程序如何配置进行管理?
CM4如果需要调用C
发表于 01-22 07:44
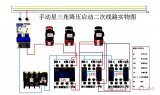
星三角降压启动运行电路图
合上QF接通电源,按下SB2启动按钮, KM1和KM3吸合电动机星接运行,间隔5秒按下SB3启动按钮,KM3主触点触点复位断开, KM2主触点闭合,电动机角接运行。
GD32 MCU启动后如何运行到main函数
GD32 MCU启动后如何运行到main函数入口?你是否也有这样的疑虑。在执行到main函数之前MCU干了哪些事情呢?下面为大家解答。





 工商网监
工商网监
评论