 研究人员最近设计并制造了受人体骨骼结构启发的机器人手指
研究人员最近设计并制造了受人体骨骼结构启发的机器人手指
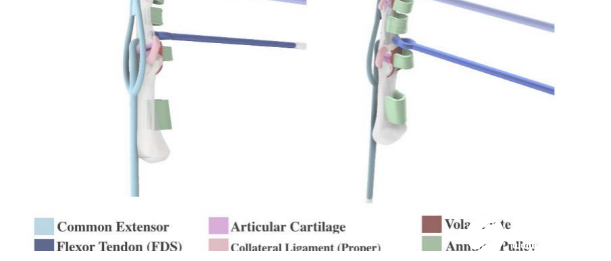
人类天生就可以通过关节的骨骼内结构进行复杂的运动。韧带和肌腱弹性地连接到相当刚性的骨骼结构,使这些运动成为可能。
加利福尼亚大学圣克鲁斯分校和日本立命馆大学的研究人员最近设计并制造了受人体骨骼结构启发的机器人手指。在今年的无处不在的机器人和环境智能国际会议(URAI)上展示的这种仿生机械手手指是使用多材料3-D打印机组装而成的。
进行这项研究的研究人员之一Maryam Tebyani对TechXplore表示:“开发像人类手一样具有硬,软组成的机械手是我要探索多年的研究课题。”“将弹性和非弹性材料结合起来将解决机器人技术中的一个普遍缺口,在这种情况下,柔性系统可能很难处理重物,而刚性平台可能需要复杂的制造或控制才能获得与人手相当的灵活性。”
Tebyani和她的同事们最近的工作的主要目的是创造受自然系统启发的机器人手。但是,研究人员希望将他们的大部分精力集中在设计人造手上,而不是在制造和组装上。因此,他们决定采用最先进的3D打印方法,该方法可以简化并加速整个原型生产过程。
Tebyani解释说:“在设计过程中利用多种材料的3D打印使我们可以自由设计3D肌腱和韧带结构,同时还允许我们在单张打印中创建电缆驱动的机器人。”“粘弹性印刷材料嵌入了我们一直在寻找的机械灵活性,因为这些材料允许产生真正有趣的被动行为。从本质上讲,该过程使机械设计能够将某些功能编程到机器人中。”
研究人员设计的机器人手指具有类似于人类的骨骼几何形状,韧带结构,人造肌肉和粘弹性腱。使用多材料3-D打印机将所有这些组件合成为单个零件。Tebyani和她的同事还使用称为MuJoCo的流行物理仿真引擎开发了手指模型。这样一来,他们就可以将机器人手指在模拟中所获得的结果与现实环境中手指的印刷原型所获得的结果进行比较。
研究人员在实验中获得的结果极有希望,突出了将3D打印和模拟技术相结合以创建复杂的机器人系统并获得对这些系统的更好控制的巨大潜力。他们最终使用的方法使他们能够将软机器人技术中普遍使用的粘弹性材料与更传统的机器人技术相结合,从而使人类骨骼内结构的复制更加紧密。
-
机器人
+关注
关注
210文章
28097浏览量
205801 -
机械设计
+关注
关注
7文章
167浏览量
19424 -
3D打印机
+关注
关注
9文章
521浏览量
44013
发布评论请先 登录
相关推荐
机器人仿真的类型和优势

NVIDIA与学术研究人员联合开发手术机器人
TPS手指触感测量一款可以精准测量力和时间变化的系统
受人眼启发!科学家开发出新型改良相机
微型导轨:手术机器人的高精度“骨骼”

北卡罗来纳州立大学:加速外骨骼机器人控制系统的研发
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
视觉机器人焊接的研究现状

高压放大器在介电弹性体折纸术软体机器人中的应用
什么是协作机器人?为什么使用协作机器人?
使用 NVIDIA Isaac 仿真并定位 Husky 机器人






 工商网监
工商网监
评论