 步进电机驱动方式及实现代码
步进电机驱动方式及实现代码
一、大致介绍:
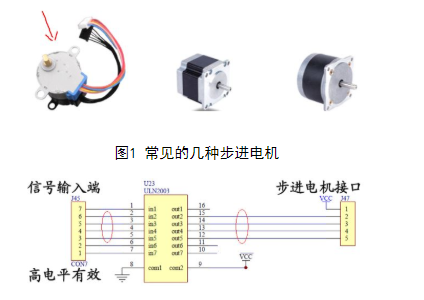
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

二、常用术语
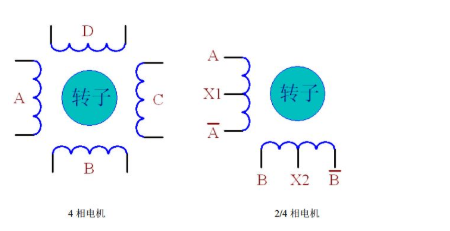
1、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
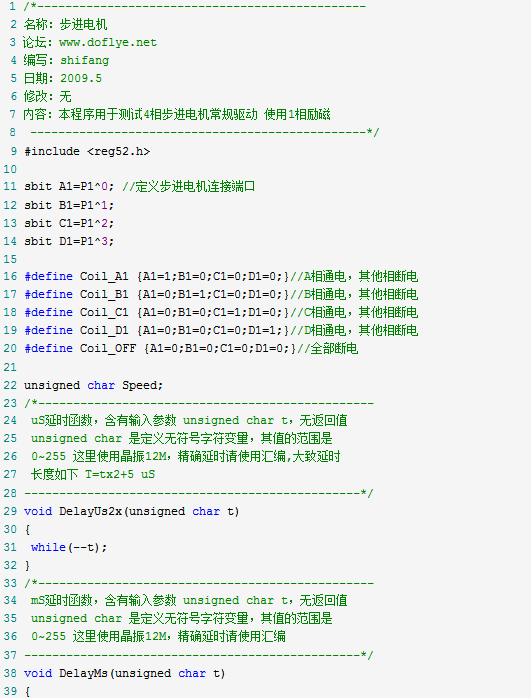
三、驱动方式
1、1相励磁法:每一瞬间只有一个线圈相通,其它休息。(优点)简单,耗电低,精确性良好。(缺点)力矩小,振动大,每次励磁信号走的角度都是标称角度。
2、2相励磁法:每一瞬间有两个线圈导通。(优点)力矩大,震动小。(缺点)每励磁信号走的角度都是标称角度。
3、1-2相励磁法:1相和2相交替导通。(优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
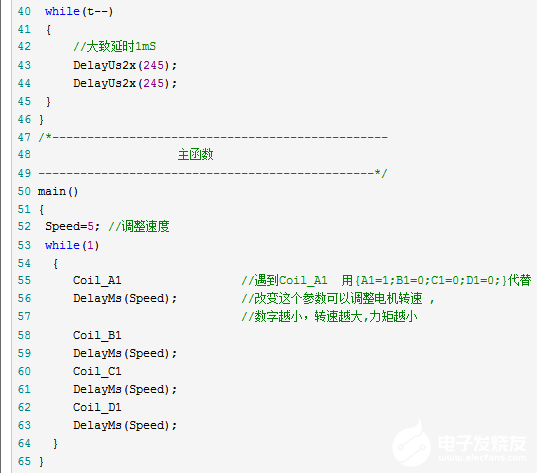
三、代码
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
步进电机
+关注
关注
152文章
3121浏览量
147959 -
脉冲信号
+关注
关注
6文章
400浏览量
37110 -
控制电机
+关注
关注
0文章
241浏览量
18285
发布评论请先 登录
相关推荐
步进电机的控制实现方法
步进电机,作为一种将电脉冲信号转换为相应角位移或线位移的电动机,是现代数字控制系统中不可或缺的重要组件。其工作原理基于电磁学原理,通过接收数字控制信号(电脉冲信号)并转化为机械位移,

微型步进电机:现代科技中的精确动力源泉
微型步进电机作为一种精密控制的电动机,在现代科技中扮演着至关重要的角色。它以高精度、可控性强、低成本等优势,被广泛应用于各种自动化设备和精密仪器中。从3D打印机、机器人,到医疗设备、消费电子产品,微型
步进电机驱动器的主要驱动方式有哪些?简单介绍
的转速和步数。脉冲驱动方式具有结构简单、控制方便等优点,适用于对精度要求不高的场合。 相序控制方式 相序控制方式是步进
步进电机如何自适应控制?步进电机如何细分驱动控制?
步进电机是一种将电脉冲信号转换为角位移或线位移的电机,广泛应用于各种自动化控制系统中。为了提高步进电机的性能,自适应控制和细分

步进电机驱动芯片大电流怎么调
磁场,进而驱动转子转动。步进电机的角位移与输入的脉冲信号成正比,因此可以通过控制脉冲信号的数量和频率来实现对电机的精确控制。 电流对
步进电机a+a-b+b-如何改变方向
步进电机是一种将电脉冲信号转换为机械角位移的执行元件,广泛应用于自动化设备、机器人、数控机床等领域。步进电机的工作原理是通过控制电机内部的线
步进电机的驱动方法有哪些
步进电机,作为一种将电脉冲信号转换为角位移或线位移的开环控制元件,在现代工业自动化、精密测量、机器人技术等领域中扮演着举足轻重的角色。步进电机





 工商网监
工商网监
评论