 伺服电机原点回零模式实现方案解析
伺服电机原点回零模式实现方案解析
1、原点回零方式简介:
有几种原点回零方法,每种方法建立:原点参考(限位或原点开关转换或编码器索引脉冲)运动方向以及索引脉冲与限位器原点开关之间的关系。
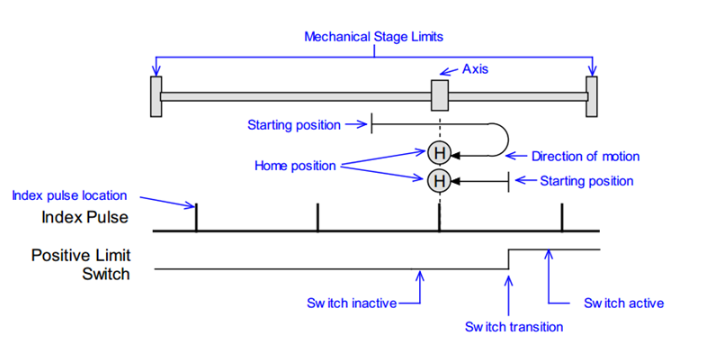
图 1 回零过程图
原点回零模式用于寻找机械原点, 并定位机械原点与机械零点的位置关系。原点回零成后, 电机停止位置为机械原点(HomePosition), 通过设置 607Ch, 可以设定机械原点与机械零点(ZeroPosition)的关系:
机械原点 = 机械零点 + 0x607C( home_offset )
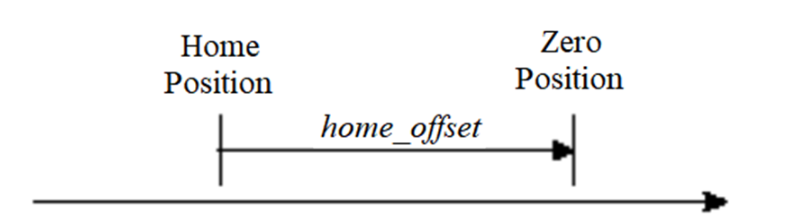
图 2 机械原点和机械零点的关系
表格 1 相关参数

回零速度包括 2 个速度, 一是搜索减速点信号速度 6099-1h( 用户速度单位 ), 此速度可以设置为较高数值,防止回零时间过长, 发生回零超时故障; 二是搜索原点信号速度 6099-2h( 用户速度单位 ), 此速度可以应设置为较低速度, 防止伺服高速停车时产生过冲, 导致停止位置与设定机械原点有较大偏差。
回零加速度 609Ah 在加速段与减速段均使用, 回零模式下快速停机使能时, 减速度由 6085h 决定
2、回零配置过程
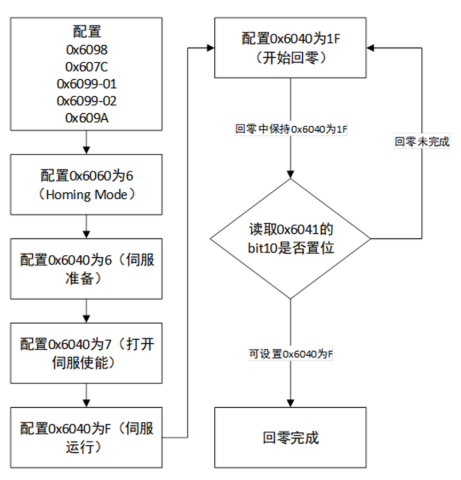
图 2 利用CANopen配置原点回零过程
原点回零模式下,上位机首先应选择原点回零方式(6098h),并设置回零速度(6099-1h 6099-2h)、回零加速度(609Ah)。给出原点回零触发信号后, 伺服将按照设定自动机械原点, 并完成机械原点与机械零点的相对位置关系设置。 伺服驱动器内部完成位置、速度与转矩控制。
举例,本次选择往负方向的限位开关机电机Z相脉冲作为矫正触发条件,如下图,其中0x6098选择为1。
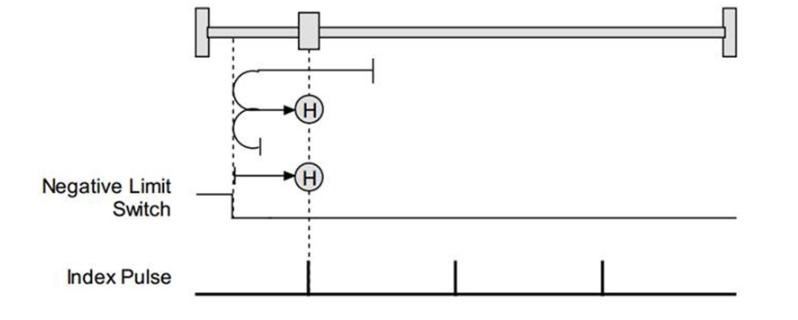
图 3 所选择的原点回零方式0x6098=1
² 注意:Copley这款驱动器不能支持用户单位和电机单位之间的自动转换,只能是自己推算一下右实际用户需要的单位和电机单位之间的转换参数。
-
CAN
+关注
关注
57文章
2774浏览量
464515 -
伺服电机
+关注
关注
85文章
2061浏览量
58287 -
伺服驱动器
+关注
关注
22文章
490浏览量
31835 -
限位开关
+关注
关注
0文章
46浏览量
4837 -
限位器
+关注
关注
0文章
5浏览量
1282
发布评论请先 登录
相关推荐
其利天下技术·伺服电机编码器的作用及工作原理·低压伺服电机驱动方案开发






 工商网监
工商网监
评论