 加州理工展示四旋翼机原型 将来可能部署到火星
加州理工展示四旋翼机原型 将来可能部署到火星

在去年的IROS大会上,加州理工学院和美国宇航局喷气推进实验室展示了一个弹道发射的四旋翼机的原型,一旦折叠成一种带有鳍的足球形状,无人机就被塞进一个管子里,然后用压缩的二氧化碳直直地向上发射,届时它就会自动展开,稳定下来,然后飞走。大约半年过去了,样机的尺寸和性能都得到了提升,现在它已拥有了6个转子和完全的自主权,可以(勉强)挤进6英寸的管子。
去年的原型机的尺寸为3英寸(7.6厘米),现在已被称为micro-SQUID,而新版的SQUID是比这个更强大的6英寸版本。(关于之前的原型设计介绍,可输入网址进行查看:https://spectrum.ieee.org/automaton/robotics/drones/caltech-and-jpl-firing-quadrotors-out-of-cannons。)当时,在研究人员对初代SQUID进行测试时,它不仅能在固定不动的弹筒里快速发射,在快速行驶的卡车上(50km/小时)发射也不成问题,而且发射速度非常快,然后平稳飞行。这极大改善了无人机起飞方式的现状,几乎可以在任何地方发射SQUID。可以想象,它或许可以在颠簸在海浪里的船只上发射,或者在飞行中的另一个无人机上发射。
micro-SQUID的目的是研究弹道发射多旋翼的一般空气动力学和结构原理,而不是开发能够执行任务的东西。任务能力意味着,除其他外,无需依赖GPS的车载自主性,而GPS反过来又要求传感和计算的重量和耗电量足以使整个车辆扩大规模。新的6英寸SQUID进行了一些重大更新,包括空气动力学重新设计,通过使用可展开的翅膀改进了发射和弹道飞行期间的被动稳定性。自治硬件包括一个摄像头(FLIR Chameleon3),测距仪(TeraRanger Evo 60m),IMU /气压计(VectorNav VN-100)和车载计算机(NVIDIA Jetson TX2)。
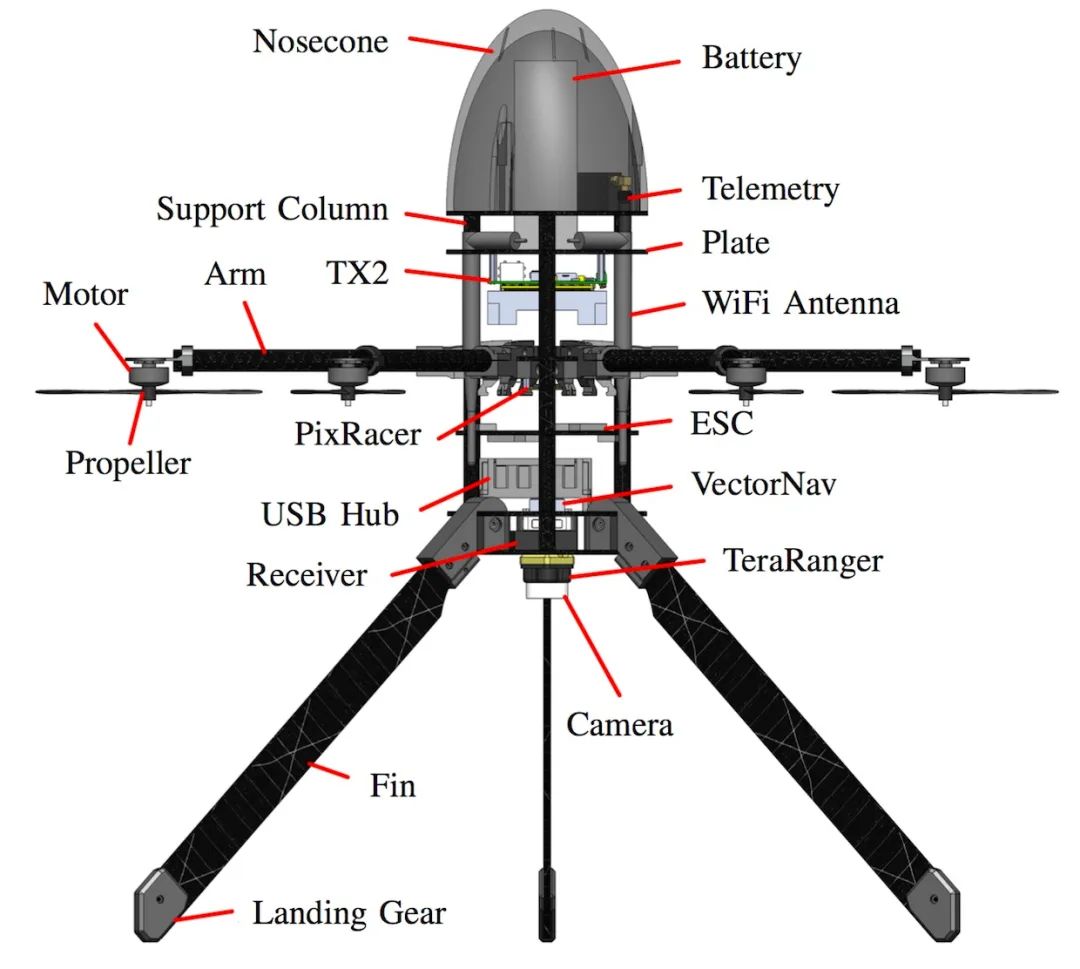
Image: Caltech & NASA JPLTop: SQUID overview. Bottom: SQUID partially inside the launcher tube (a), with its arms and fins fully deployed from a side (b), and top perspective (c).
结构和空气动力学的改变是必要的,因为SQUID在飞行的第一阶段根本就不是真正的飞行,而是在离开发射架后沿着它所处的弹道飞行。如果它只是直线上升,那也不算太糟,但如果无人机以一定角度发射,或者从移动的飞行器上发射,情况就会变得更加复杂,需要考虑空气动力学,以确保无人机在发射后沿着弹道运动的姿态稳定性。较高的重心(电池位于鼻锥中)对此有帮助,可展开的翅膀起到双重作用:使无人机被动地指向气流中,同时还充当起落架。翅膀具有闩锁机制,以使其既可折叠又足够稳定。
SQUID的6英寸尺寸是一个真正的挑战。你不仅要把所有的电池和电脑塞进这个空间,还要确保传感器有他们需要的视野,同时要记住,在折叠状态下,所有的手臂和腿都必须与其他物体共享同一空间。不过,事实证明,SQUID的优化效果非常好,重量只有3.3公斤。
既然管式发射存在那么多挑战,为什么还要采用这种发射方式呢?原因如下:
迅速发射:无需组装或设置,不需要寻找平坦的地面,也不用提醒每个人都退后。只需按下按钮,SQUID 就能以每秒 12 米的速度发射出去并进入飞行状态。
安全发射:该飞行器发射时具备高度安全性,除非有人直接坐在发射管顶端。
移动发射:SQUID 可以从时速高达 50mph 的移动车辆中发射,这一点使其能够应用于紧急情况,从而大大提高了其效用。
穿过物体发射:研究者指出,SQUID 可以在其气动外形(机翼或旋翼没有展开)下,直接穿过树冠或电线发射。此前,只有旋翼机能做到这一点。
我们(作者,以下简称我)向研究人员询问了他们开发更大版本SQUID的经验,他们向我们分享了一个幕后故事,讲述了他们如何成功地设置了一些东西,
将其转移到更大版本的SQUID,在技术上来说是困难的(因为我们必须有一个全新的设计),但测试组织工作是一个巨大的飞跃。对于我们的小SQUID来说,只要一张网和一些备件就足以让测试持续一天。但是当我们转移到更大的SQUID时,我们需要把更重的东西“抛”向天空,里面装载着昂贵的自主电子设备。 室内系绳系统的设置具有挑战性,因为CAST arena的高度(42英尺高)意味着没有cherry-picker,绳索的理想定位点是完全无法到达的。加州理工大学的无人机俱乐部加紧了脚步,在天花板横梁周围编织了一条小型四旋翼拖曳钓鱼线,帮助建造了系绳系统。然后用钓鱼线把更大的绳子拉过去。 其中一件有趣的事情是,SQUID离开发射管时的极度加速意味着缆绳变得非常松弛,实际上有可能被螺旋桨缠住或割断。幸运的是,我们的增量测试活动在问题会发生之前就意识了这一点。为了应对这种松弛的系链情况,我们建造了一个鼻锥,在顶端安装了一个5英尺长的碳纤维管,我们称之为SQUID的剑鱼鼻(我们已经有了一点水上主题)。一个拴在SQUID身体上的系链穿过管子,连接到更大的铸链系统。我们确认,在发射过程中(对于我们给定的发射参数),系链不会下垂到低于管的位置,因此我们阻止了所有系链推进器的相互作用。
火箭实验室的Electron可以向近地轨道(LEO)发射高达225千克(496磅)的有效载荷,但它计划在不久的将来将其扩增至300千克(660磅)。虽然这只是Falcon 9可以携带到LEO的50,300磅重量中的一小部分,但Rocket Lab的每次飞行费用为500万美元,而SpaceX的起步费用为6,200万美元。目前,在美国的首次发射还没有确定日期。
“弹道发射多旋翼的设计和自主稳定”由来自加州理工学院和喷气推进实验室的AmandaBouman、Paul Nadan、Matthew Anderson、Daniel Pastor、Jacob Izraelevitz、Joel Burdick和Brett Kennedy在ICRA 2020大会上发表,该论文被授予无人机领域的最佳论文。
原文标题:加州理工学院的加农炮式可折叠SQUID无人机有一天可能部署到火星
文章出处:【微信公众号:IEEE电气电子工程师学会】欢迎添加关注!文章转载请注明出处。
-
无人机
+关注
关注
237文章
11389浏览量
196728 -
SQUID
+关注
关注
0文章
5浏览量
7493 -
加州理工学院
+关注
关注
0文章
3浏览量
2137
原文标题:加州理工学院的加农炮式可折叠SQUID无人机有一天可能部署到火星
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
光伏四可数字孪生:全景可视与实时数据展示方案

创通联达发布基于高通跃龙IQ10的开发公板原型TurboX IRB10

光伏四可装置软件系统架构:微服务化设计与容器化部署方案
从模型到产品:Qwen2.5-VL在BM1684X边缘计算部署全攻略

RL78/G16快原型开发板使用指南:从入门到实战
隼眼科技与理工雷科达成战略合作
RA8P1部署ai模型指南:从训练模型到部署 | 本周六




评论