 精度、分辨率和动态范围之间的差异
精度、分辨率和动态范围之间的差异
今天来聊聊精度、分辨率和动态范围之间的差异。本文还将揭示信号链内部的不精确性是如何累积并导致误差的。
定义新设计的系统参数时,这些内容对于理解如何正确指定或选择一个ADC有着重要作用。
1
精度、分辨率与动态范围
许多转换器用户似乎在互换使用精度和分辨率这两个术语,但这种做法是错误的。精度和分辨率这两个术语并不相等,但是具有相关性,所以,不应互换使用。可以把精度和分辨率视为堂兄妹,但不是双胞胎。
精度就是误差,或者说测量值偏离真值的幅度。精度误差可以称为灵敏度错误。分辨率就是测得值的表示或显示精细度。即使系统的分辨率为12位,也并不意味着它能测量精度为12位的值。
例如,假设一块万用表可以用6位数来表示测量值。则该万用表的分辨率为6位,但是,如果最后一位或两位数似乎在测量值之间摆动,则分辨率会受到影响,测量精度同样会受到影响。系统或信号链里的误差会一直累积,使原始测量值失真。因此,了解系统的动态范围也很关键,以便衡量要设计的信号链的精度和分辨率。
我们再以万用表为例。如果表示位数为6,则其动态范围应为120 dB(或6 × 20 dB/十倍频程)。但要注意的是,最后两位仍在摆动。因此,真实动态范围只有80 dB。这就是说,如果设计人员要测量1 µV(或0.000001 V)的电压,则该测量值的误差可能高达100 µV,因为实际器件的精度仅为100 µV(或0.0001 V或0.0001XX V,其中,XX表示在摆动的最后两位)。
实际上,描述任何系统的整体精度的方法有两种:直流和交流。直流精度表示整个给定信号链中展现出来的“偏离”累积误差,这种方法有时称为“最差条件”分析。交流精度表示整个信号链中累积的噪声误差项,这项指标决定着系统的信噪比(SNR)。然后把这些误差累加起来,结果会使SNR下降,并产生整个设计更真实的有效位数(ENOB)。实际上,取得这两个参数可以告诉用户,在静态和动态信号下,系统有多精确。
低频SNR、ENOB、有效分辨率和无噪声代码分辨率之间的关系。
记住,ADC可以“接受”多种信号(通常分为直流或交流),并以数字方式对信号进行量化。了解ADC在系统中的误差意味着,设计人员必须了解要采样的信号的类型。因此,信号类型取决于如何定义转换器误差对整个系统的贡献。
这些转换器误差一般以两种方式定义:无噪声代码分辨率(表示直流类信号)和“信噪比等式”(表示交流类信号)。
由于电阻噪声和“kT/C”噪声,所有有源器件(如ADC内部电路)都会产生一定量的均方根(RMS)噪声。即使是直流输入信号,此噪声也存在,它是转换器传递函数中代码跃迁噪声存在的原因。
其更常用的说法为折合到输入端噪声。折合到输入端噪声通常用将直流输入施加到转换器时的若干输出样本的直方图来表征。大多数高速或高分辨率ADC的输出为一系列以直流输入标称值为中心的代码。
为了测量其值,ADC的输入端接地或连接到一个深度去耦的电压源,然后采集大量输出样本并将其表示为直方图(有时也称为“接地输入”直方图)-见图1。
由于噪声大致呈高斯分布,因此可以计算直方图的标准差σ,它对应于有效输入均方根噪声,表示为LSB rms。
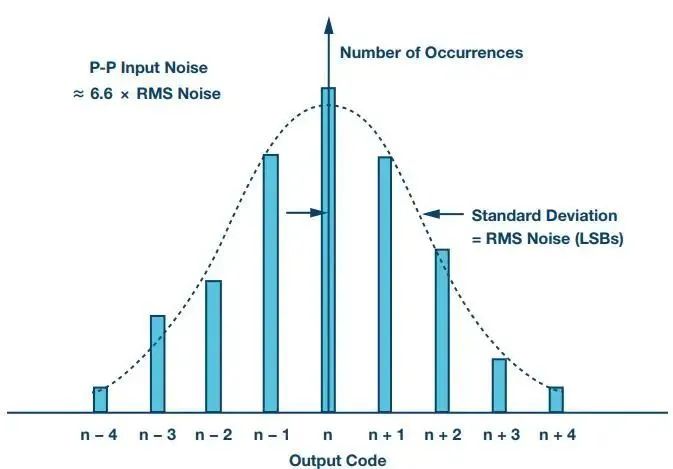
图1.转换器折合到输入端噪声或ADC“接地输入”直方图。
虽然ADC固有的差分非线性(DNL)可能会导致其噪声分布与理想的高斯分布有细微的偏差,但它至少大致呈高斯分布。如果代码分布具有较大且独特的峰值和谷值,则表明存在PC板布局欠佳、接地不良、电源去耦不当等问题。
典型情况下,折合到输入端噪声可以表示为均方根量,单位通常是LSB rms。涉及这类量的规格通常与高分辨率精密型转换器相关,原因在于较低的采样速率和/或其采集的直流类或低速信号。
设计用于精度测量的Σ-Δ ADC,其分辨率在16至24位之间,其数据手册一般会列出折合到输入端噪声、有效分辨率、无噪声代码分辨率等规格,用以描述其直流动态范围。
另一方面,面向音频应用的较高频率的Σ-Δ ADC一般都用总谐波失真(THD)和总谐波失真加噪声(THD + N)来描述。
逐次逼近型(SAR)转换器涵盖了广泛的采样速率、分辨率和应用。它们通常有折合到输入端噪声,但对于交流输入信号,则还有SNR、ENOB、SFDR和THD等规格。
虽然采样频率为数百MHz或以上的高速转换器(如流水线式转换器)通常以SNR、SINAD、SFDR、ENOB等交流规格来描述,但它们也能采集直流类信号或低速信号。因此,了解如何从数据手册上列出的交流规格推算出高速转换器的低频性能是非常有用的。
2
侧边栏讨论:SNR等式
理想转换器对信号进行数字化时,最大误差为±½ LSB,如一个理想N位ADC的传递函数所示。对于任何横跨数个LSB的交流信号,其量化误差可以通过一个峰峰值幅度为q(一个LSB的权重)的非相关锯齿波形来近似计算。对该近似法还可以从另一个角度来看待,即实际量化误差发生在±½ q范围内任意一点的概率相等。
图2更详细地显示了量化误差与时间的关系。一个简单的锯齿波形就能提供足够准确的分析模型。锯齿误差的计算公式如下:
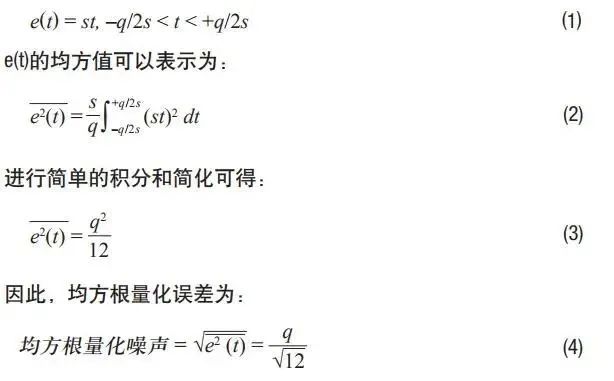
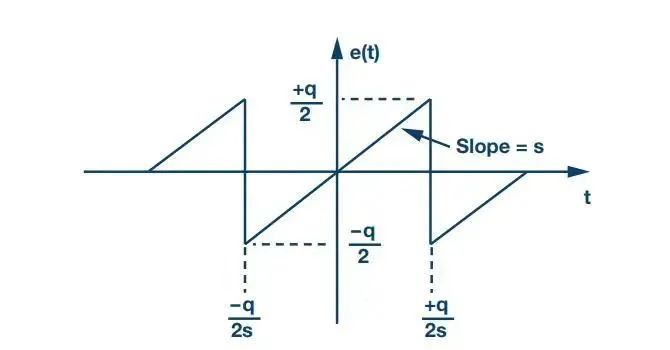
图2.量化噪声与时间的关系。
锯齿误差波形产生的谐波远远超过奈奎斯特带宽或直流至Fs/2,其中,Fs = 转换器采样速率。然而,所有这些谐波都会折回(混叠)到奈奎斯特带宽并相加,产生等于q/√12的均方根噪声。
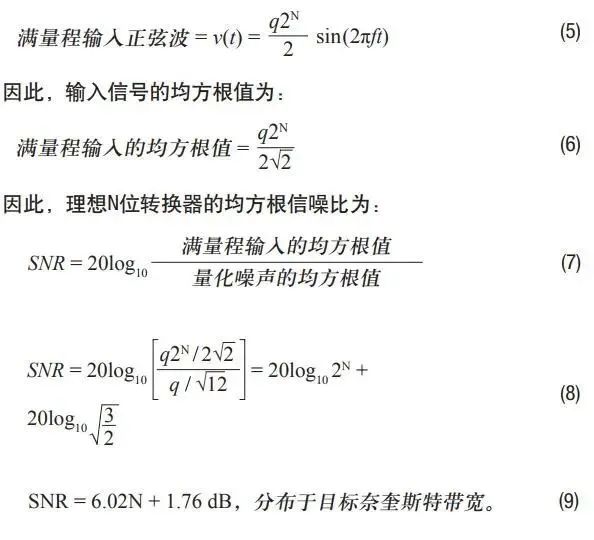
量化噪声大致呈高斯分布,均匀分布于目标奈奎斯特带宽上,其范围通常为直流至Fs/2。这里假设量化噪声与输入信号不相关。理论信噪比现在可以通过一个满量程输入正弦波来计算:
要理解低速、直流类信号与高速交流类信号规格量之间的关系,确实需要一些数学知识。所以,请打开大学里用的数学书,翻到后面的标识表。接下来,我们来看看如何理解低频输入SNR、ENOB、有效分辨率和无噪声代码分辨率之间的关系。
假设FSR = ADC满量程,n = 折合到输入端噪声,则(均方根)有效分辨率定义如下:
对于交流分析,则要使用满量程正弦波输入。另见上面的侧边栏讨论,其中:
因此,代入等式16,就可推算出ENOB、交流类信号和直流类(低速)信号之间的关系。或,
总之,对于直流低速信号,系统ENOB约比转换器的无噪声代码分辨率大1位(确切为0.92位),比转换器的有效分辨率小2位。
然而,随着信号速率的加快,或者对于涉及带宽的交流类信号,转换器的SNR和ENOB会变得与频率有关,并且在高频输入下会下降。
3
信号链中的转换器不精确性
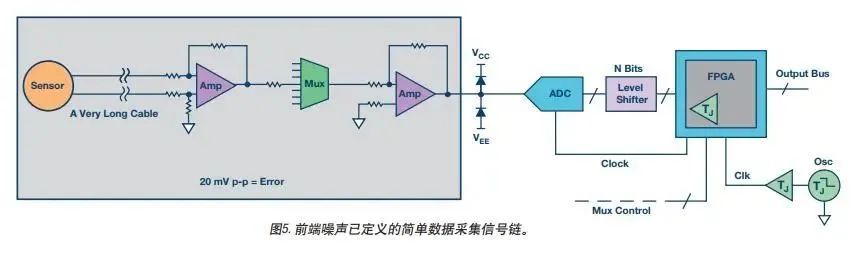
以上我们了解了转换器误差,接下来,我们将讨论信号链中的剩余部分,以在系统层面了解这些概念。图3所示为一个简单的数据采集信号链示例。
图中,一个传感器连传感器的交流信号先是推过两级预调理放大器,然后,到达要采样的ADC输入端。此处的目的是设计这样一个系统,使其可以精确地表示传感器信号,精度保持在传感器原始值的±0.1%之内。嗯,似乎颇具挑战性?
为了设计出这样的系统,有必要思考有哪些类型的误差可能会影响传感器的原始信号,还要想想它们来自信号链的哪个部分。设想一下,在最终对信号采样时,转换器最后会看到什么。
假设在此例中,ADC的满量程输入为10 V,分辨率为12位。如果转换器是理想的转换器,则可确定其动态范围或SNR为74 dB。
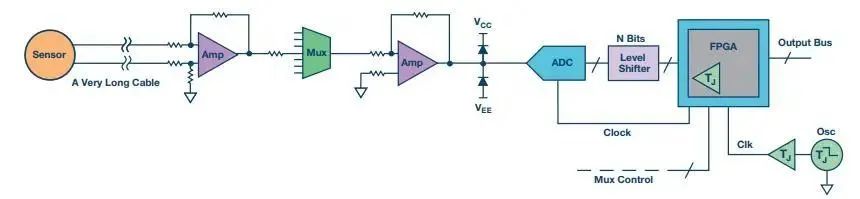
图3.简单的数据采集信号链。
SNR = 6.02 (12) + 1.76 = 74 dB (19)
然而,数据手册规格只会显示,转换器的SNR为60 dB或9.67ENOB。
ENOB = (SNR – 1.76)/6.02 = (60 – 1.76)/6.02 = 9.67 位 (20)
请注意SNR和ENOB的计算方法:在用数据手册中的SNR数据计算ENOB时,设计人员必须明白的是,该数据可能包括,也可能不包括谐波。如果确实包括失真,则可使用SINAD,后者定义为SNR与失真之和,有时称为THD(总谐波失真)。
图4. 记住,20 dB/十倍频程,或3 × 20 = 60 dB
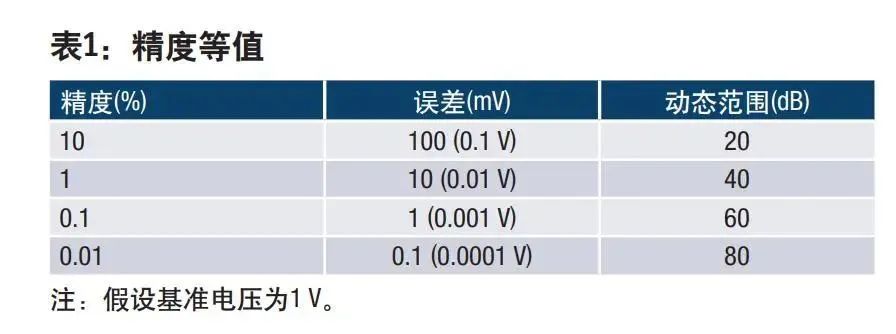
表1列出了一些简单的等值换算,供确定目标系统性能时参考。
4
其他系统不精确性
要注意上面的信号链示例中建议的全部前端组件。正因为转换器精度达到或超过系统定义的系统精度规格,所以,还有更多的不精确性要理解——即前端、电源、任何其他外部影响或环境。
如上图3所示,这种信号链的设计可能非常复杂,超过了本文讨论的范围。但可以对与这种信号链相关的不精确性/误差进行简单总结,如表2所示。

在任何信号链里都存在许多误差,更不用说电缆和其他外部影响,这些因素也可能在很大程度上决定着这种系统的设计。无论累积误差怎样,最终都会与信号一起在转换器端被采样——假设误差不会大到能屏蔽被采样信号的程度!
在用转换器进行设计时,要记住,对于系统精度的定义,等式包括两个部分。一是上面描述的转换器本身,二是用来在转换器之前调理信号的所有组件。
记住,每丢失1位,动态范围就会减少6 dB。推论就是,每获得1位,系统灵敏度就会增长2倍。因此,前端要求的精度规格要远远高于用于对信号采样的转换器精度。
为了展示这一点,我们采用与图3所示相同的前端设计。假设,前端本身的不精确性为20 mV p-p;即是图5所示累积噪声。系统精度仍然定义为0.1%。同样的12位转换器,其精度能否达到定义的系统规格要求?答案是不能,原因如下。
以下是其计算方法,其中所用ADC的SNR = 60 dB。

注意,20 mV的噪声可使系统灵敏度下降1位或6 dB,使系统性能从要求的60 dB降至54 dB。
为了解决这个问题,可能应该选择一种新型转换器,以便维持60 dB或0.1%的系统精度。
我们选择一款ADC,其SNR/动态范围为70 dB,或者,其ENOB为11.34位,看看是否有用。

看起来性能并无多大变化。为什么?因为前端的噪声太大,无法实现0.1%的精度,虽然转换器的性能本身要远远好于规格要求。需要改变前端设计,以便实现需要的性能。这种情况如下面的图6所示。
知道最后一个配置示例为什么不起作用吗?设计人员并不能简单地选择一款更好的ADC来提高系统的整体性能。
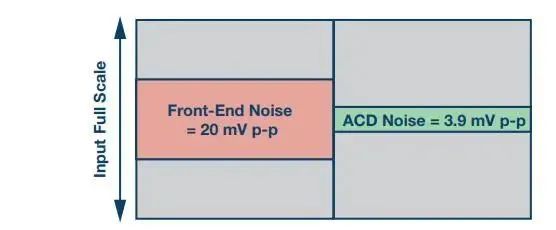
图6. 前端噪声与12位70 dB ADC噪声比较。
5
加总情况
前面选择的10 V满量程、12位ADC的动态范围为60 dB,可实现0.1%的精度。这意味着,总累积误差需要小于10 mV或10 V/(1060/20),才能达到0.1%的精度要求。
因此,必须更换前端组件,以把前端误差降至9 mV p-p,如图7所示,所用转换器的SNR为70 dB。
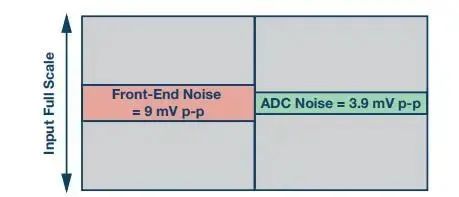
图7. 低前端噪声与12位70 dB ADC噪声比较。
如果要使用14位、74 dB ADC,如图8所示,则对前端的要求甚至可以进一步放宽。但这种折衷可能会导致成本增加。
这些折衷要根据具体的设计和应用进行评估。举例来说,更值得的做法可能是加大对容差更小、漂移更低的电阻的投入,而不是投资采购性能更强的ADC。
6
分析总结
精度误差、分辨率和动态范围之间的关系就先聊到这里,这些指标为针对具体应用选择转换器提供了不同的参考,这些应用则要求达到一定的测量精度。
了解所有组件误差以及这些误差对信号链的影响至关重要。
注意,并非所有组件均生而平等!创建囊括所有这些误差的电子表是插入不同信号链组件的简便方法,可更快进行评估并决定组件的权衡取舍,如表2所示。在不同组件的成本之间进行权衡时,尤其如此。
最后,请记住,单纯增加信号链中转换器的性能或分辨率无法提升测量精度。如果依旧存在同样数量的前端噪声,精度将不会得到改善。只会让这些噪声或不精确性测量达到更精细的程度,并最终可能让设计人员的老板付出更多的成本。
-
adc
+关注
关注
99文章
6581浏览量
547124 -
信号链
+关注
关注
0文章
207浏览量
29991 -
精度
+关注
关注
0文章
262浏览量
20228
原文标题:揭秘:高速信号链内不精确性是如何累积和导致误差的
文章出处:【微信号:eda365wx,微信公众号:EDA365电子论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高光谱相机的空间分辨率,光谱范围等参数我们要如何理解

如何在输入电压范围确定的情况下最大的使用AD的分辨率?
24位或者说高分辨率的AD到底有什么用呢?
如何提高透镜成像的分辨率
如何选择扫描电镜的分辨率?

请问ISO7720的时间分辨率有多少?
HDMI接口支持哪些视频分辨率
强劲性能!24位高分辨率与2.5 MS/s采样率完美结合 —— 工控自动化音频测试福音!

视频处理器的分辨率是如何管理的







 工商网监
工商网监
评论