 最早的波士顿动力机器狗ASV介绍
最早的波士顿动力机器狗ASV介绍
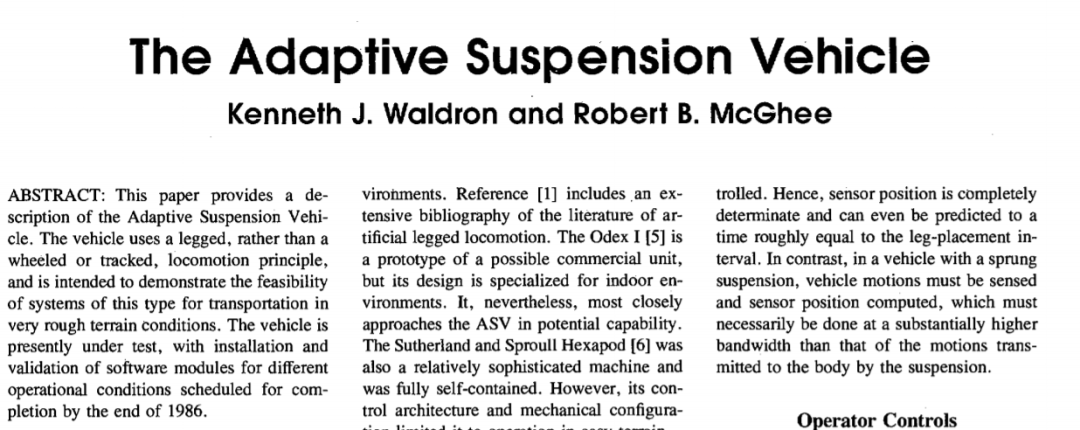
这个 3 米高的庞然大物诞生于 80 年代,比波士顿动力机器狗还早 20 多年。
前段时间,波士顿动力机器狗 Spot 正式开售,而且已经有买家晒出了首个开箱视频。波士顿动力机器狗项目由美国国防高等研究计划局(DARPA)资助,初衷是研制一种能够负重的机械骡,和士兵一起在传统机械车辆无法行驶的粗糙地形上作战。2005 年,Spot 的前辈——「Big Dog」机器狗的发布让波士顿动力声名远播。
波士顿动力发布的「Big Dog」机器狗。 但很多人不知道的是,波士顿动力 Spot 其实并不是 DAPRA 资助最早的「机器狗」,一个名为「ASV」的项目比它还要早二十多年。 ASV 是一个身高 3 米、体长 5.18 米的庞然大物,宽度也达到了 2.4 米,相当于一辆卡车,所以有媒体将其称为「行走的卡车」。
波士顿动力机器狗:「这是我爸?」 这么个大家伙走起路来也是相当威风的:
这个项目始于 1981 年 1 月,由 DARPA 出资、俄亥俄州立大学的两位教授 Robert McGhee 和 Kenneth Waldron 负责打造。项目的初衷是想造出一款足式机器人,在坦克履带无法行进的地形中完成任务。
和波士顿动力 Spot 不同的是,ASV 里面还坐了一名操作员,在某些情况下手动操作机器的六条腿:
为了减轻操作员在操作过程中花费的体力和脑力,这个庞然大物体内安装了 17 台计算机。 按照今天的标准来看,这些计算机其实是很简陋的。机器人肩膀上那 6 个笨重的矩形盒子其实就是计算机所在的位置,每个盒子里都装了一台英特尔 "86/30" 128k, 8-bit 计算机,用来控制机器人的腿部运动。
其余的 11 台计算机各自负责不同的任务,比如控制操作员座舱内的 CRT 显示器、分析腿部以及脚上的压力传感器收集到的数据、根据座舱里的 128x128 像素扫描测距仪的数据确定最佳落脚点等。所有这些数据都由操作软件来解读,该软件是用 Pascal 写的,包含 15 万行源代码。而这些代码的任务只有一个:让 ASV 漫步。 在座舱里,操作员借助按键和操纵杆控制 ASV 的行走路线。
两位教授曾在一篇论文中提到,ASV 的最终目标是实现自主行走。但最终,这个目标没能实现。当然,钱不是问题,这个项目每年都能从 DARPA 那里拿到 100 万美元的资助,真正的限制条件是当时计算机的处理能力。
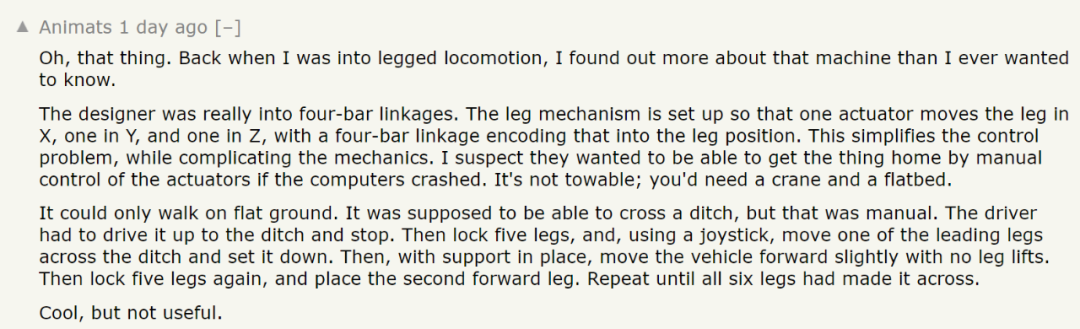
其实,那些钱不止花在了计算机上,整个 ASV 的机械系统也很复杂。 ASV 的核心位置安装了一个 900cc 的摩托车引擎,峰值输出可以达到 91 马力,但它不止为一个巨大的液压泵提供动力。在该引擎和 18 个可变排量泵(用于驱动 ASV 的液压缸)之间有一个 100 磅的飞轮,每分钟可以转 12000 转,存储 0.25 kWh 的能量。这意味着,它可以在一小时内输出 250 瓦的电力。 这点非常有用,因为 ASV 的 18 个泵是由一个非常复杂的系统来驱动的。引擎通过齿形传送带将动力从输出轴传递到三个独立的传动轴上。这些装置从前往后连接着整个 ASV,然后通过更多的齿形传送带将动力传到泵上(每条腿 3 个泵)。 为了在这种高摩擦系统中完成高耗能动作,ASV 需要的动力要超出引擎所能提供的动力。这种情况下,飞轮储存的能量就派上了用场。当 ASV 突然停下来时,飞轮可以帮助机器从泵中回收一些能量,确保在突然失去动力的情况下平稳地停下来,类似于混合动力汽车的再生制动系统。 得益于这种复杂的驱动系统,ASV 的行进速度最快可以达到 12.9km/h(相当于普通人的中级慢跑)。虽然也不是很快,但以这个速度行进时,里面的人会感觉颠簸。而且,这个庞然大物重达 5952 磅(约 2699.8 千克),但有效荷载只有 485 磅(约 220 千克)。在种种因素制约下,ASV 的巡航速度控制在 6.4km/h 左右。 然而,缓慢的巡航速度限制了 ASV 的实用性。 由于体型比较大,ASV 可以越过 2 米多高的垂直障碍和 7 米多宽的战壕,但缓慢的巡航速度限制了它的实用性。因此,DARPA 还是对这个项目失去了兴趣,并于 1990 年将其彻底砍掉。 经过了这么多年,ASV 已经下落不明,有消息称它被打包放在俄亥俄州立大学的某个地方,也有人猜测它可能在 DARPA 手里。 至于这个项目到底有没有意义,目前还存在一些争论。有位网友介绍说,这个大家伙可能只适合在平地行走。如果要跨越一道沟,操作员必须进行手动操作:先将五条腿锁住,使用操纵杆将一条腿迈过去,然后用这条腿做支撑将身体往前挪,接着再锁住五条腿将第二条腿迈过去并重复这个步骤,直到六条腿都迈过去。因此,ta 觉得这个东西没什么用。
但也有人认为,这个项目所踩的坑可以为之后的研究提供很多借鉴,钱花得不冤枉。

不过可以肯定的是,开着这么一辆机器「卡车」在街上走肯定比遛波士顿动力机器狗还拉风。
-
机器人
+关注
关注
211文章
28438浏览量
207192 -
机器狗
+关注
关注
3文章
171浏览量
10144
原文标题:这是波士顿动力机器狗他爸?身高3米,人机联合操作
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

1300套机器人大订单来了
特朗普启用带激光雷达机器狗巡逻
安波福入选BCG“2024年最具创新力企业”
直线电机生产厂家谈人形机器人迎来新奇点

波士顿动力人形机器人Atlas电动版亮相:前沿技术迎来新时代

人形机器人未来面临的挑战与争议
所有操作层都接入AI,Menteebot给人形机器人发展带来新思路
波士顿动力公司推出电动版Atlas机器人,展现卓越灵活性与敏捷性

波士顿动力推出全新纯电动人形机器人,拓展运动范围






 工商网监
工商网监
评论