 V2X:未来智能交通运输系统的关键技术
V2X:未来智能交通运输系统的关键技术
目前,汽车行业正在步入以网联化、智能化、电动化、共享化为代表的新四化时代。所谓智能化,即自动驾驶,毫无疑问已成为全球车企的兵家必争之地。自动驾驶感知系统在实际应用中所具备的潜力,也逐步被挖掘出来。
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合同,让电脑可以在没有任何人为主动的操作下,自动安全地操作车辆。
感知系统,是用摄像头(眼睛)看前面的路,还在用雷达(耳朵)听车周围(前、后、左右)的车、人及实体的,甚至会用信息识别单元(大脑)在分析、判断。感知系统由三部分组成,即传感器、高精度地图和信息识别单元。
就自动驾驶系统中的传感器而言,其主要包括雷达和光学摄像头,相当人的耳朵和眼睛,主要功能是车辆收集周围的“即时信息”,实时了解车辆周围的环境,为无人驾驶车辆提供完整、准确的各类环境数据。常用的传感设备包括:光学摄像头、光学雷达(LiDAR)、微波雷达、导航系统等。
摄像头是众多预警、识别类ADAS功能的基础。车载摄像头主要包括环视摄像头、内视摄像头、后视摄像头、前置摄像头、侧视摄像头等。其中,光学摄像头是场景解读的较佳工具,能较好地分辨颜色,但是没有立体视觉效果时,缺乏“深度“,无法判断物体和相机(车辆))间的距离。为实现相关功能的提升,还需从制造材料、工艺等方面多做探索。
不管需不需要做倒车场景,后向感知能力对于乘用车以及商用车都是需要的。拿拖挂式卡车来说,可以很好地挖掘现有感知系统的潜力,这样即使不增加新的传感器,依靠算法也能实现一定程度上的后向感知能力,帮助车辆正确预知正后方行人、车辆的运动状况,从而促进安全驾驶。
此外,从目前自动驾驶产业发展状况来看,激光雷达是帮助自动驾驶系统正确感知、精确感知的重要元件。激光雷达通过发射和接受激光束,分析激光遇到目标对象后的折返时间,就能够计算出目标对象与车的相对距离。与此同时,利用此过程中收集的目标对象表面大量密集的点的纹理、高度、反射率、三维坐标等信息,将各类相关数据汇总起来,以此绘制出环境地图,从而达到环境感知的目的。此时,激光雷达为自动驾驶汽车精确“描绘”出周边环境的优势也就得以展现。
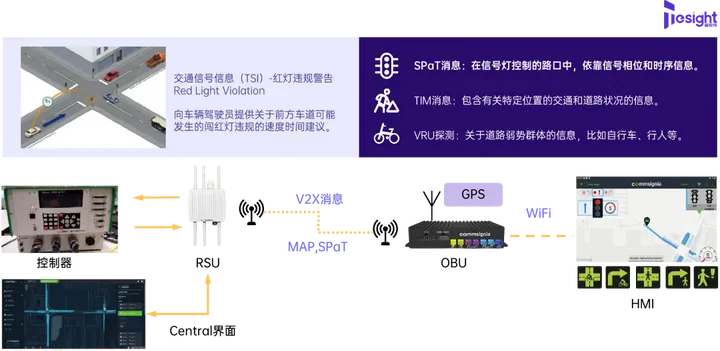
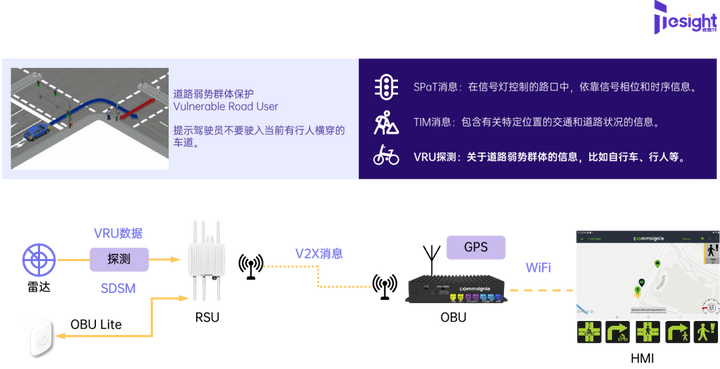
在自动驾驶中,V2X被业内人士视为是未来智能交通运输系统中的一项关键技术。借助该技术,车辆能够实时感知多种信息。通过实时分析路况及交通信息,选择较佳的驾驶路线,减少交通堵塞的几率,节省不必要的时间。
当然,归根结底,自动驾驶车路协同方案的技术底层是车辆的智能化、网联化。通过将“人、路、车、云”等交通参与要素有机地联系在一起,可以支撑车辆获得比单车感知更多的信息,推动自动驾驶技术升级和生态创新。此外,综合采用5G、物联网、大数据、云计算等数据,也有助于构建起智慧交通体系,促进汽车和交通服务新业态的出现,对于提高车辆通行效率、提高公共交通资源配置效率大有助益。
责任编辑:tzh
-
摄像头
+关注
关注
59文章
4836浏览量
95599 -
5G
+关注
关注
1354文章
48436浏览量
563965 -
大数据
+关注
关注
64文章
8882浏览量
137397 -
自动驾驶
+关注
关注
784文章
13784浏览量
166389
发布评论请先 登录
相关推荐
兆芯与交通运输信创实验室完成合作签约,助力产业发展再提速
西井科技自动驾驶项目入选交通运输部第二批智能交通先导应用试点项目

四川它人参与项目获批交通运输部第二批智能交通先导应用试点

隼眼科技荣获中国交通运输协会科学技术奖!
交通运输部大力推广适老化无障碍交通服务
云天励飞与深圳市交通运输局举行战略合作协议签订仪式
中交兴路荣获“2023年度中国交通运输协会科学技术奖一等奖”!
让交通运输更安全、更高效,人工智能可以做些什么?
V2X技术与智能传感器的完美融合:提升城市道路安全
罗德与施瓦茨联合Autotalks成功验证第三代V2X芯片组性能
交通运输行业中用哪种无功补偿技术

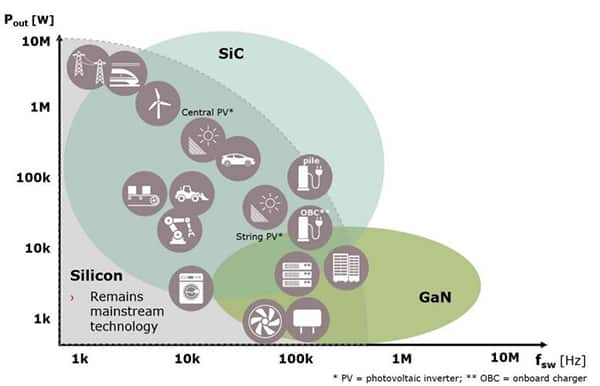
宽带隙半导体重塑交通运输行业
德思特分享丨V2X在做什么?连接未来智能出行的车联网(下)





 工商网监
工商网监
评论