 舵机转速与电压之间的关系
舵机转速与电压之间的关系
来源:电子森林
舵机 在自动控制场合被广泛应用。舵机的输出力矩、转动速度、命令更新频率等标准了舵机的工作性能。在 全国大学生智能车竞赛中 ,大多数车模作品的方向控制都使用了舵机控制。在赛道上运行的车模速度,在 控制参数设置 合理的情况下,最高速度取决于舵机的响应速度。
通常,舵机的运行取决于 舵机特有的脉冲指令高电平时间宽度 ,而与脉冲指令的频率无关。所以控制舵机的脉冲波形与控制电机运行的PWM波形的作用是不同的。
舵机内部具有驱动电路板,保证输出角度与脉冲指令的宽度之间呈现比例关系。舵机输出转角速度则取决于舵机本身内部机械结构、电机的性能、工作电压等各种因素。
由于舵机的转速与指令无关,所以从本质上讲, 舵机不是一个线性模型 。当舵机转动角度越大,它的动态非线性就越明显。
01舵机转动速度与工作电压
舵机的转动速度越快,在智能车竞赛中车模控制性能就会越好。正好手边测试了一个 角度编码器 ST-3806-15-RS ,它有每周15bit的角度分辨率。这款角度编码器用于一款 双轴机械臂 的控制中。现在正好可以用它来测试舵机转动的角度、角速度。依次来分析舵机工作电压与执行速度之间的关系。
1.测量方法
选择S-D5舵机,使用橡胶套管将舵机输出轴与角度编码器连接在一起。使用机械平台将它们固定、共轴。使用 角度编码器 ST-3806-15-RS 测试电路模块来读取角度传感器的数值,控制多级的转动。
▲ 使用角度传感器测量舵机旋转速度
给定舵机脉冲指令,从1000us突变到2000us。舵机顺时针旋转60°。在这个过程中,采集角度的速率为3ms,读取200个。得到的角度曲线如下:
取角度上升线性部分(距离最下,最上各5%的余量),进行线性拟合。再计算拟合直线与最小角度、最大角度对应的时间交点。使用这个交点之间的时间差作为舵机的执行时间。执行时间的倒数可以反映舵机输出角速度。
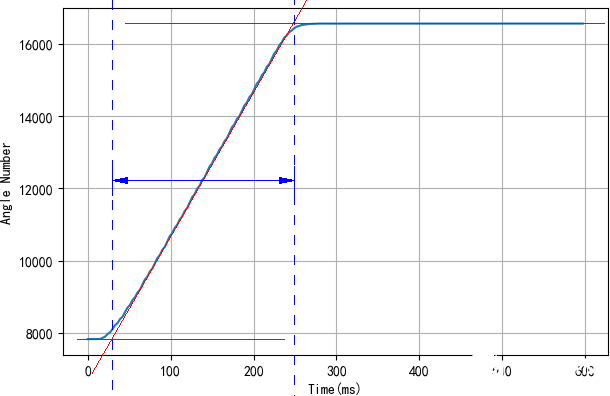
▲ 测量旋转角度曲线对应执行时间
2.测量数据
下面使用数控直流电源调节舵机工作电压,从4.0V ~ 6V,分成20个工作电压点。在每个工作电压点,测量舵机的转动曲线,使用上面的方法,获得舵机的转动时间。
▲ 随着工作电压的增加,舵机转动角度的曲线的变化
下图给出了舵机转动时间与工作电压测量的数据曲线。工作电压越高,舵机执行时间就越短。
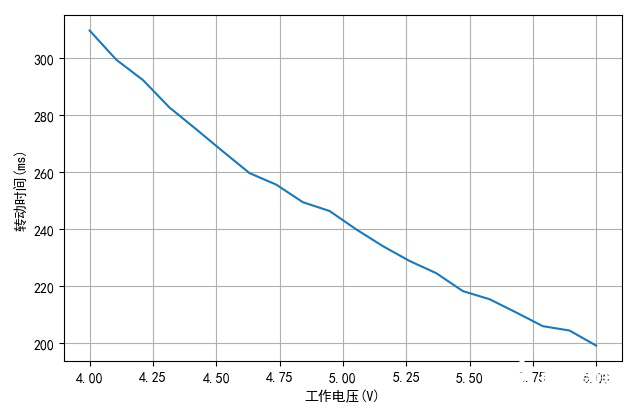
▲ 工作电压与转动时间之间的关系
将上述时间取倒数(1000/time(ms)),可以获得下面的舵机转动相对速度与工作电压之间的关系。大体可以看到舵机执行速度与工作电压成正比。
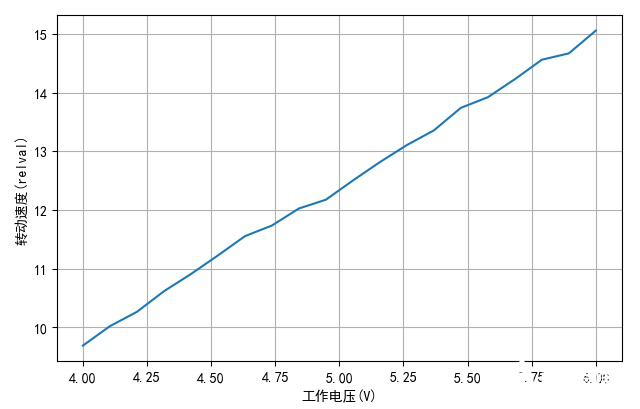
▲ 工作电压与舵机转动速度之间的关系
02分析结论
通过前面的分析可以看出:
为了提高多级的执行速度,可以在舵机允许的工作电压范围内尽可能提高舵机的工作电压;
为了避免高的工作电压对舵机内部的电路过压的影响,需要在舵机工作电源进行必要的限幅和稳压。
在舵机工作过程中,如果频繁的转动,需要考虑到舵机散热;
▲ 舵机指令在1000us在2000us之间切换变化
此外,还可以通过在舵机输出轴,增加执行悬臂的长度,来通过机械放大提高舵机控制车模前轮转向的速度。
-
电压
+关注
关注
45文章
5601浏览量
115714 -
舵机
+关注
关注
17文章
269浏览量
41020
发布评论请先 登录
相关推荐
BUCK电路占空比与输出电压关系
电功率与热量产生之间的关系
ADS7869输入电压与转换数据之间是什么关系?
转速与电动机参数的关系
电机的转速和扭矩的关系
变频器频率与电机转速关系是线性的吗
MOS管导通电压和温度的关系
什么是相电压、线电压?它们之间有何数量关系?
舵机是否属于伺服电机
BLDC电机的转速和PWM占空比之间的关系是什么?
舵机三根线分别是什么?一文解析舵机各线缆对应关系





 工商网监
工商网监
评论