 机器人Pepper可检测人们有没有戴口罩
机器人Pepper可检测人们有没有戴口罩
9月10日,在法国巴黎的软银机器人公司,机器人Pepper展示检测人们是否正确佩戴口罩的功能。为抑制新冠病毒传播,近日,软银机器人Pepper“掌握”了一项新技能——通过自带的摄像头扫描人脸,检测对方有没有佩戴口罩,并给予礼貌提醒和指导。新华社发(奥雷利安·莫里萨尔摄)
原文标题:机器人Pepper:“今天你戴口罩了吗?”
文章出处:【微信公众号:青岛科技通】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28189浏览量
206446 -
软银
+关注
关注
4文章
337浏览量
23988
原文标题:机器人Pepper:“今天你戴口罩了吗?”
文章出处:【微信号:qdkjjkjt,微信公众号:青岛科技通】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
动作逐步过渡到赋予机器人更高级的自主决策能力。
国际上的科技巨头(如波士顿动力、特斯拉和软银)都在这一领域取得了显著进展。
软银的 Pepper 机器人以其能进行情感交流而闻名,这是机器人
发表于 11-11 10:20
开源项目!用ESP32做一个可爱的无用机器人
、固件烧录等。
注意事项
制作这个机器人的材料成本比较高,接近一台全新笔记本电脑的价格。此外,如果没有焊接经验,整体成本可能更高,因为还需要涉及到PCB组装。
完成
完成后,机器人可以通过WiFi
发表于 09-03 09:34
智能分拣投递机器人
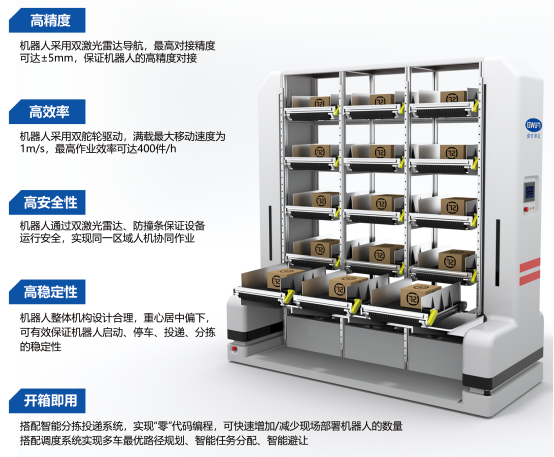
自研智能分拣投递机器人,专注于物流行业“NC小件”的分拣与投递,机器人运行稳定、分拣效率高,搭配智能分拣投递系统单台机器人最大作业效率可达400件/H,投递效率相较于传统“小黄人“提升了30%-50%,
开源项目!用ESP32做一个可爱的无用机器人
、固件烧录等。
注意事项
制作这个机器人的材料成本比较高,接近一台全新笔记本电脑的价格。此外,如果没有焊接经验,整体成本可能更高,因为还需要涉及到PCB组装。
完成
完成后,机器人可以通过
发表于 08-30 14:50
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简
ROS系统是一个开源免费,架构精简的机器人操作系统。ROS被设计为尽可能精简,以便为ROS编写的代码可与其
发表于 07-09 11:38
Al大模型机器人
和迭代来不断改进自身性能。它们可以从用户交互中学习并根据反馈进行调整,以提高对话质量和准确性。可定制性与整合性: AI大模型机器人可以根据特定需求进行定制和整合,以满足不同场景和应用的要求。它们可以与其
发表于 07-05 08:52

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
软银集团AI芯片与机器人布局,成AI巨头
据悉,该芯片将由台积电(2330)操刀生产。软银集团对AI发展的热情高涨,其与鸿海(2317)集团在人形机器人Pepper项目上的成功合作,以及桦汉(6414)在AI相关领域的实力,引起了业界对他们在AI机器人领域未来布局的广泛
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
随着懒人经济的崛起,智能家居设备的需求呈现出显著的增长态势。作为智能家居领域的一员,扫地机器人因其方便、实用的特性而备受消费者青睐。特别是在无刷电机技术的加持下,扫地机器人不仅提升了清洁效率,还优化
发表于 05-05 15:03
戴盟机器人发布Sparky 1:人形机器人两大阵营已现,要能跑能跳还是要心灵手巧
近日,人形机器人Figure 01爆火,引发了人们对未来人形机器人触达生活的无限遐想。日前,戴盟(深圳)机器人科技有限公司(以下简称

开年首秀 多可机器人携“机器人+”无限应用强势登陆
扫描检测、多机协调等多种创新应用震撼亮相,现场获众多媒体和客户青睐,多款展品火爆全场。 多可传输系统解决方案 该应用主要展示多可智能物料输送系统(OHS)与移动协作机器人(ARV)的无间隙配合,实现全自动、跨车问、横向和点对点
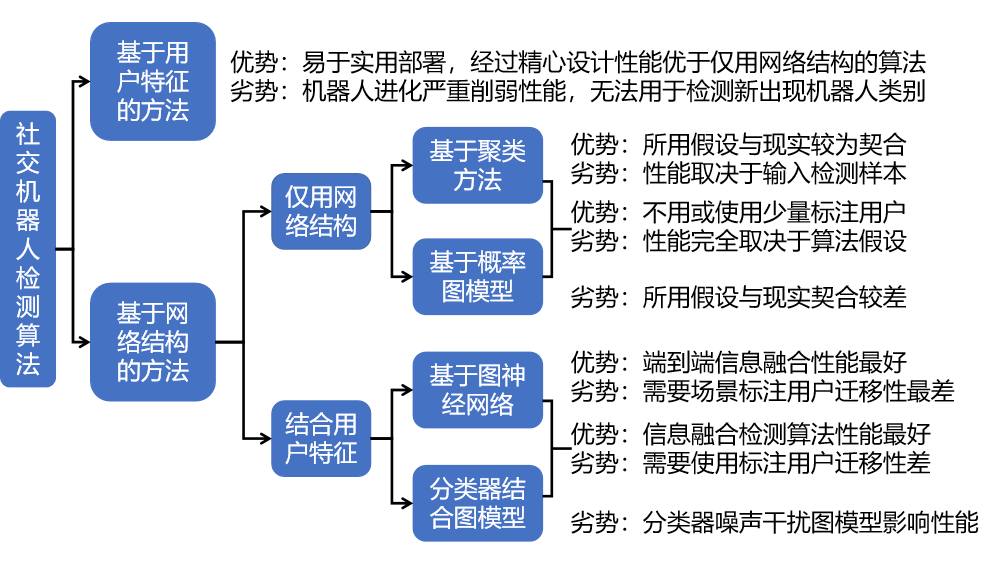
网络社交机器人检测的关键技术
在线社交网络面临着网络社交机器人操控的威胁,而现有的检测算法还不能缓解这种威胁。如何有效利用人工智能技术检测社交机器人,规避其潜在的风险并保障网络的良好生态,是当前亟需解决的重要任务。
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
是一个开源免费,架构精简的机器人操作系统。ROS被设计为尽可能精简,以便为ROS编写的代码可与其他机器人软件框架一起使用,如ROS已与OpenRAVE、Orocos和Player集成。正是由于这一特点
发表于 11-30 16:01





 工商网监
工商网监
评论