 磁响应材料和双稳态Kresling型折纸结构构成了一种新型的多功能驱动器
磁响应材料和双稳态Kresling型折纸结构构成了一种新型的多功能驱动器
于民间的折纸(Origami)艺术不仅具有艺术审美价值,还蕴含数学运算和空间几何原理。近些年来,折纸在科学界引起了越来越多的关注,已经被广泛运用到了航天、生物医疗等领域,这些应用利用了折纸艺术变形特性来建立各式各样多功能、易展开、可变特性的系统。可靠的变形需要合适的驱动,目前常用的驱动方式包括机械、气动或者以形状记忆高分子为代表的智能材料,然而现有的方法往往具有驱动器体积庞大,驱动系统复杂,导线气动软管束缚,响应速度慢,或不易实现分布式控制等缺点。
俄亥俄州立大学赵芮可教授团队和佐治亚理工学院Glaucio H. Paulino教授团队将磁响应材料和双稳态Kresling型折纸结构结合构成一种新型的多功能驱动器,通过编辑磁场大小方向及磁响应材料的磁化方向,可以远程控制驱动器在0.1s内实现状态切换,并瞬间锁定形状。更重要的是无需增加任何部件即可实现Kresling驱动器装配体的分布式控制(Distributed actuation),仅通过控制单一磁场就能实现多个驱动单元的独立控制,大大降低了系统复杂性。除此之外,Kresling驱动器还展示了可调的机械刚度(Tunable Stiffness)特性及集成驱动和计算(Integrated actuation and computing)于一体的能力,展示了机器人应用的潜力。 研究成果于北京时间2020年9月15日以 “Untethered control of functional origami micro-robots with distributed actuation” 为题发表在《美国国家科学院院刊》(PNAS)上。
Kresling驱动单元的磁驱动原理如图1所示,首先将磁化后的磁片粘贴在折纸结构顶端,若外加磁场的方向与磁片的磁化方向不同,将产生趋向于磁场方向的转矩,通过控制磁场的方向和大小,当磁转矩在驱动单元旋转的过程中始终大于所需要克服的转矩(图一C中的紫色区域),则驱动单元可以克服折纸结构的能量壁垒,在折叠状态和展开状态之间快速切换 (视频一)。
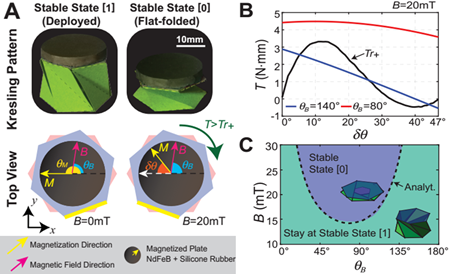
图一:Kresling驱动单元的驱动原理
视频一 当多个Kresling驱动单元层叠在一起组成装配体,通过设计区分各单元上磁片的磁化方向,各单元所受磁转矩的大小和方向不同,可以实现装配体各单元的同时驱动和分布式控制。例如图二中由两个相同单元组成的装配体,在完全折叠状态下,上下两个磁片的磁化方向相差90°,通过调节外加磁场大小和方向,装配体可以从完全折叠状态驱动为其他三种状态。 基于分布式控制的原理,当Kresling驱动器装配体变为另外一个状态后,各单元上磁片的磁化方向也相应的发生变化,此时驱动所需的磁场方向和大小也会发生变化,通过合理设计和计算,装配体在任意状态之间可以实现直接或者间接的快速切换。
图二:Kresling驱动器装配体的多单元分布式控制原理
视频二
图三:Kresling驱动器装配体各状态间的循环驱动
视频三 研究团队进一步研究了Kresling型驱动器各单元独立控制并协同作用带来的潜在应用。对于驱动单元,通过对折纸结构的设计可以获得不同的能量壁垒,具体到本文,折纸高度越高则能量壁垒越大。当四个高度不同的单元层叠成装配体时,由于每个单元的刚度均不同,装配体结构可以随着状态的切换获得16种不同的刚度特性,配合磁驱动可以用来设计刚度快速可调的阻尼器。
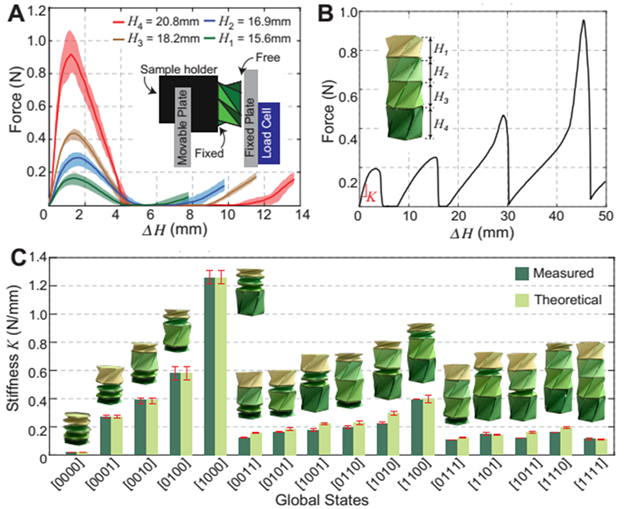
图四:Kresling驱动器的可调刚度特性 除此之外,双稳态Kresling驱动器具有与施密特触发器类似的特性,将输入转矩看成输入信号,机械状态看成输出信号(展开状态为二进制输出1,折叠状态为二进制输出0),则输入转矩与输出数字状态0和1之间具有固定的关系。与传统施密特触发器相比,一方面,双稳态Kresling驱动器的可以实现相似的模数转换和信息存储功能(如图五和视频四中展示的三位存储器,分布式控制驱动实现存储信息的改变,LED实时显示存储的信息),更重要的一方面,Kresling驱动器还可以被动的感应外界负载的大小并通过磁驱动主动的做出响应,因此集成了驱动、传感和计算的功能于一体,完美契合机器人所需要的感应-决策-响应的所有功能,是新一代智能机器人系统的潜在方案。
图五:基于Kresling驱动器的数字存储电路
视频四
该工作提出使用磁场无线驱动复杂的折纸结构装配体,瞬间响应的特性和简单的系统设计克服了传统驱动方式的诸多缺点,同时仅需要一个输入源即可以实现复杂装配体的分布式控制。团队成员表示希望下阶段的工作可以实现驱动器的运动,结合集成的传感和计算功能,将磁驱动折纸应用在智能机器人领域。 本文通过结构的双稳态特性实现了形状锁定(shape-locking),赵芮可教授团队和佐治亚理工的齐航教授团队今年还通过设计一种新的材料,即磁驱形状记忆高分子(Magnetic shape memory polymer, M-SMP)来实现形状锁定,该材料可通过控制磁加热和磁驱动实现低温形状锁定和高温快速变形,相关成果发表在《先进材料》(Advanced Materials)上。磁驱形状记忆高分子材料 – 形状记忆与快速形变的完美结合
团队介绍:该工作由俄亥俄州立大学软智能材料实验室(Soft Intelligent Materials Laboratory,链接: http://zhaor.engineering.osu.edu)和佐治亚理工学院计算力学实验室(Prof. Glaucio H. Paulino's Computational Mechanics Research Group,链接: http://paulino.ce.gatech.edu/index.html)共同完成。该工作的通讯作者为赵芮可教授和Glaucio H. Paulino教授,共同第一作者为佐治亚理工学院博士生Larissa S. Novelino,俄亥俄州立大学博士后迮弃疾博士,以及俄亥俄州立大学博士生吴帅。
论文链接:
https://www.pnas.org/content/early/2020/09/11/2013292117
原文标题:PNAS:多功能磁集成Origami的分布式控制
文章出处:【微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
-
驱动器
+关注
关注
54文章
8365浏览量
147588 -
材料
+关注
关注
3文章
1272浏览量
27461
原文标题:PNAS:多功能磁集成Origami的分布式控制
文章出处:【微信号:zhishexueshuquan,微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论