 机器人路线图:从互联网到机器人
机器人路线图:从互联网到机器人
2020年9月美国计算机社区联盟(CCC)发布第四版《机器人路线图:从互联网到机器人》(以下简称“路线图”),探讨了机器人在未来5年、10年和15年作为关键经济促进者的使能作用,尤其是在制造、医疗和服务行业。本版路线图基于对第三版路线图进展的审查和评估进行了更新,总结了既定的主要社会机遇、待解决的相关挑战以及需要采取的措施,包括技术创新及其采用和政策措施两方面,以确保美国在机器人技术领域的持续领先地位。
在美国计算机社区联盟(CCC)的支持下,2009年工业界和学术界联合制定了首份《机器人路线图:从互联网到机器人》,促成了美国国家机器人计划(NRI)的设立。2013、2016年在美国国家科学基金会(NSF)和CCC的支持下,路线图进行了修订。新版路线图总结了制造业、生活质量、物流、农业、医疗、安全、运输等七个领域的社会驱动力,提出了成本、高混合度、安全性、易用性、响应时间、鲁棒性等六个方面的挑战,最终将挑战映射到架构与设计实现、移动性、抓取和操作、感知、规划和控制、学习和适应、人机交互、多机器人协作等八个机器人研究领域,突出了在新材料、集成传感、规划/控制方法等方面的新研究内容以及多机器人协作、鲁棒计算机视觉识别、建模和系统级优化方面的新研发内容。
一、机器人的架构和设计实现
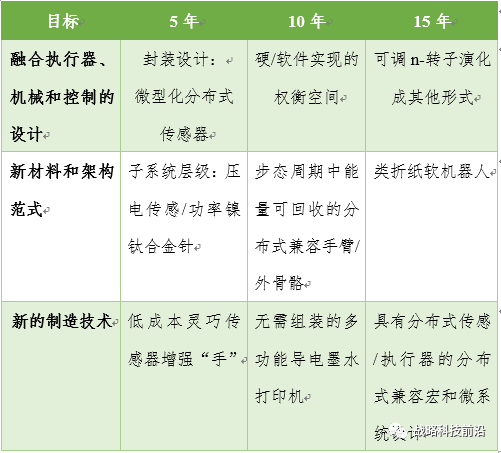
机器人技术逐步从传统带有离散感知/驱动关节和集成控制器的低自由度的刚性连杆架构迈向具有分布式/集成式多模态传感/驱动的可变拓扑重构高自由度系统。机器人在现实环境中成功应用的核心要求包括:半自主操作、对环境的持续适应、数据驱动的学习和控制以及能效和零停机,具体研究方向包括:(1)重构网络-物理系统架构;(2)解决分布式异步复杂系统中模/数转换数字接口设计挑战;(3)实时机器人数字信息架构;(4)集成传感/执行、机械和控制的多功能模块;(5)新材料范式:柔性材料;(6)新的制造技术:增材制造。
表1 未来5-15年的技术发展目标
二、机器人的移动性
腿是机器人在许多环境中最有效的移动解决方案,目前有四足机器人和两足机器人,后者对人类来说有更广泛的适应和协作空间。足式机器人技术的研发可以衍生出康复机器人和外骨骼等副产品,同时其物理驱动机制具有一定的普适性。足式机器人在移动操作平台方面仍处于起步阶段,且需要配备更轻、更小、更低能耗的感知和计算包。
未来5-15年的技术发展目标:
(1)未来5年目标:足式机器人可实现3英尺降落后正常运作,水平运作可达到0.8m每秒的行进速度,在平整地面环境可续航5h以上。它具有实时感知、映射和推理能力以实现自主导航。
(2)未来10年目标:足式机器人可实现滚落后正常运作。给定一个近似的环境地图,它可以自主且强健地合成和执行给定的移动和操作任务,如搬运碎片以搜寻幸存者。
(3)未来15年目标:人形机器人可以在完全非结构化、动态环境中自主且强健地运作。
三、机器人的抓取和操作
一些研究团队和公司正在探索机器人抓取的新方法,抓取不熟悉对象的方法目前可分为3D模型、硬件设计、演示学习、强化学习四类。机器人抓取的新方法是基于物理或模拟数据的训练学习,未来5-15年的技术发展目标如下:
(1)未来5年目标:生产出廉价的机器人夹持器能够从杂物箱中抓取新奇的刚体,其可靠性接近人类,并将应用于电子商务和制造业中。
(2)未来10年目标:生产出廉价的机器人夹持器能够从杂物箱中抓取大量刚体和柔体,其可靠性超过人类,能够精准定位并从箱子中提取特定的目标物体。
(3)未来15年目标:生产出各式各样的机器人夹持器,可靠地从杂物箱中抓取任何刚体或柔体,但不包括形状极端不称的物体,如苹果耳机。
机器人操作方面的发展方向是完全沉浸式、具有触觉的临场感以及多模态传感器反馈,未来5-15年的技术发展目标如下:
(1)未来5年目标:研制出带有触觉传感器阵列的简单机器人手,能够执行抓握调整或简单物体再抓握。
(2)未来10年目标:研制出带有触觉传感器阵列的中度复杂的机器人手,能够执行动态抓握调整和再抓握。
(3)未来15年目标:研制出带有触觉传感器阵列的高度复杂的机器人手,其密度和灵敏度接近人类,能够高速全手抓取新奇物体并精细控制;其技能和可靠性接近人类,可以执行灵巧的操作任务。
四、机器人的感知
计算机视觉技术发展迅速,触觉技术也有一定的进展,其它感知技术进展有限。机器人技术在可靠性和速度方面对计算机视觉提出独有的挑战,需要推进的关键技术包括:(1)从观察视频活动推进到主动执行类似任务;(2)主动感知;(3)复杂、高维度推理;(4)开放性(Open-world Performance);(5)与其它系统的集成性;(6)系统结构,如图像端到端强化学习与可迁移性之间的权衡。
五、机器人的规划和控制
未来的机器人将需要更先进的控制和规划算法,能够处理不确定性和自由度更大的代理系统。在过去,控制和规划被认为是两个单独问题,而现在控制和运动规划越来越需要综合处理。相关的技术方向包括:不确定环境下的任务和运动规划,抓握规划和操作,复杂和动态环境下的自主规划和约束控制,高维、高动态和混合系统的控制,自主性平滑可调的规划和控制。
六、机器人的学习和适应系统
未来机器人将面临成千上万种不同的任务,需要自己或在人类的帮助下学习和适应。未来5-15年的技术发展目标如下:
(1)未来5年目标:在传统机器人平台中引入机器人学习、持续改进机器人在相当受限的环境中执行特定任务的性能。
(2)未来10年目标:通过新材料和架构,微型/大型机器人和机器人数量来提升机器人平台的多样性,要求机器人学习应对日益增长的复杂性;开发大规模、实用的数据集、基准等。
(3)未来15年目标:机器人在协作环境中无缝操作。
七、多机器人系统
多机器人系统已成功应用于制造业、仓库管理、灾害监测、建筑和农业等领域,但在分布式控制与决策、分散/集中混合机制、异构机器人团队、多机器人系统的通信和传感等方面面临着诸多挑战。
未来5-15年的技术发展目标如下:
(1)未来5年目标:自动生成分布式控制算法,在分布式控制和决策方面取得重大进展,可实现多时间尺度处理,互操作处理,多维度(功能、空间和时间)处理,形成权衡移动、传感和通信的有效模型。
(2)未来10年目标:在真实环境中有力地部署大规模机器人团队,并且通过云架构实现团队间相互学习和协作;实现以人为中心的商用群系统;通过动态团队组合实现复杂任务的异构解决方案;优化传感、移动和通信之间的功耗。
(3)未来15年目标:实现在农业、制造业、仓储和环境监测等多个行业的商业化应用和大规模部署;通过大力部署低成本混合协作机器人团队实现真正的“机器人物联网(Internet-of-Robotic-Things)”生态。
八、人机交互
机器人在人机交互方面仍然面临理解人类、多时间尺度交互、信任度、接受度等诸多问题,具体挑战包括:交互多样性带来的难以客观评估;缺乏用于人机交互研究的机器人平台;缺乏来自交互场景的可用数据集;缺乏真实世界评估的途径。
未来5-15年的技术发展目标如下:
(1)未来5年目标:机器人能够可靠地确定与上下文相适应的基本行为和情感表达;机器人能够在半受控设置下与用户保持几个月的互动、学习和适应;增强和交互现实系统,将允许特定场景专业人员实时利用和操作机器人数据;机器人能够解释它们的行为,取得人们的信任;通过大规模研究使人们在很大程度接受机器人;人机交互系统的社区试验台、评估指标,可以直接比较不同方法;在结构化的现实环境中进行机器人研究测试。
(2)未来10年目标:机器人可以动态地学习和更新用户和任务模型,并在半结构化的任务和环境中处理感知、建模和适应,能够适应环境和用户的合理变化;可以处理对话中的突发事件,适应用户状态,并在半受控设置下无缝集成社会行为;在半结构化设置下工作一年,并满足多个用户需要;能够模拟人们的期望和事先理解,以提供最相关的信息来促进信任;共享自主系统可以确定用户目标,同时不断调整和促使用户支持这些目标并选择适当的自主度;用户所期望的机器人功能将会部署、应用和测试。
(3)未来15年目标:机器人利用历史交互信息和公开数据来调整自己的行为以适应个体;人机信任达到人人信任水平;机器人越来越多地出现在日常工作场所、公共场所和家庭中,安全地履行特定的角色和任务;用于机器人接口的编程工具,支持标准、弹性目标,解决安全和隐私问题;机器人可以在半结构化的任务和环境中感知、建模和适应复杂的用户行为、动作和意图,并跨领域和环境迁移学习;机器人可以在不受控设置下,通过对话和社会交互策略,适应不同的用户群体;机器人不仅能够识别而且能够预测意外事件、用户错误、以及人类协作者不断变化的能力,并采取行动防止或最小化其影响;共享自主系统可以集成和融合各种形式的用户输入,动态地为用户目标和错误建模,在必要时改变与用户沟通的自主度;在几年的时间里,面对不同能力水平的任意数量的用户,机器人将在不受控制的环境中维持自适应功能;基于已部署系统的长期使用和交互理解,相关准则和标准将加以完善,使机器人无缝地融入社会,在不受控设置下实现安全、有效和可接受的协同工作。
-
机器人
+关注
关注
211文章
28445浏览量
207199 -
互联网
+关注
关注
54文章
11158浏览量
103346
原文标题:【政策规划】美国发布最新《机器人路线图:从互联网到机器人》
文章出处:【微信号:gh_22c5315861b3,微信公众号:战略科技前沿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
从市场角度对机器人的基本解读

开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
巡检机器人有哪些功能和作用?

「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论