 点云匹配与ICP算法基本思想
点云匹配与ICP算法基本思想

点云匹配
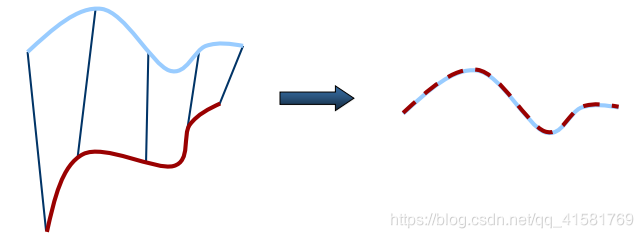
图像配准目的在于比较或融合。针对同一对象在不同条件下获取的图像,因为激光扫描光束受物体遮挡的原因,不可能通过一次扫描完成对整个物体的三维点云的获取。因此需要从不同的位置和角度对物体进行扫描。三维匹配的目的就是把相邻扫描的点云数据拼接在一起。三维匹配重点关注匹配算法,常用的算法有最近点迭代算法 ICP和各种全局匹配算法。
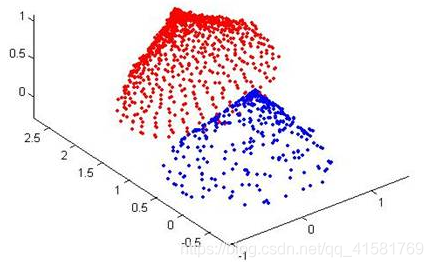
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法。如下图所示,PR(红色点云)和RB(蓝色点云)是两个点集,该算法就是计算怎么把PB平移旋转,使PB和PR尽量重叠。
ICP算法基本思想:
三维点云匹配问题的目的是找到P和Q变化的矩阵R和T,对于 ,,利用最小二乘法求解最优解使:
最小时的R和T。
先对平移向量T进行初始的估算,具体方法是分别得到点集P和Q的中心:
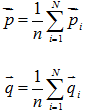
在计算转换之前,从两个点集中的每个点减去相应的质心。

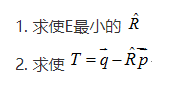
则上述最优化目标函数可以转化为:

最优化问题分解为:
目标函数E(R,t)的优化是ICP算法的最后一个阶段。在求得目标函数后,采用什么样的方法来使其收敛到最小,也是一个比较重要的问题。求解方法有基于奇异值分解的方法、四元数方法等。
ICP算法优点:
可以获得非常精确的配准效果
不必对处理的点集进行分割和特征提取
在较好的初值情况下,可以得到很好的算法收敛性
ICP算法的不足之处:
在搜索对应点的过程中,计算量非常大,这是传统ICP算法的瓶颈
标准ICP算法中寻找对应点时,认为欧氏距离最近的点就是对应点。这种假设有不合理之处,会产生一定数量的错误对应点
-
算法
+关注
关注
23文章
4816浏览量
98758 -
ICP
+关注
关注
0文章
80浏览量
13983 -
点云
+关注
关注
0文章
59浏览量
4099
原文标题:点云匹配介绍与ICP算法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
单片机常用的14个C语言算法分享
C语言插入排序算法和代码
自动驾驶模型是如何“看”懂点云信息的?

目标追踪的简易实现:模板匹配
Montgomery模乘介绍
请问ISP-ICP 编程器是否支持 76E003at20?
瑞芯微RK3576人体关键点识别算法(骨骼点)

AI 驱动三维逆向:点云降噪算法工具与机器学习建模能力的前沿应用

自动驾驶中常提的“点云”是个啥?




评论