 VisionPro项目组成简介
VisionPro项目组成简介
一、脚本简介
1.1VisionPro项目组成简介
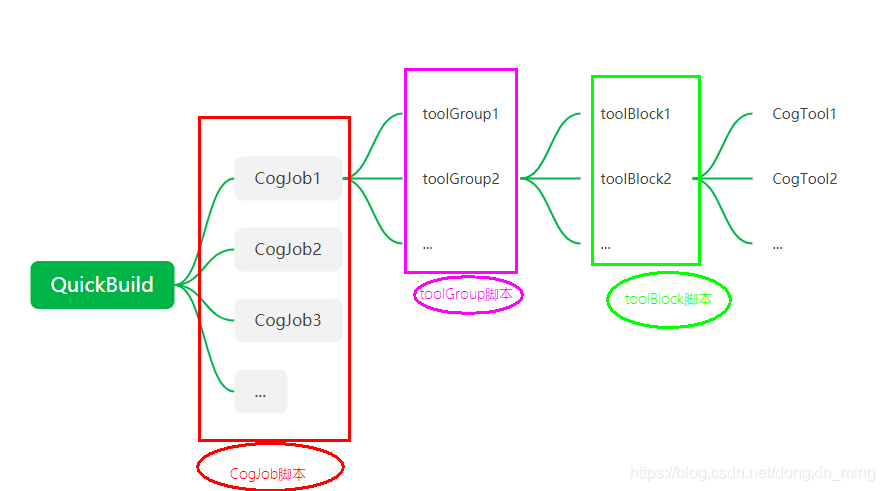
在介绍脚本之前先简单介绍一下VisionPro开发环境(QuickBuild)的项目结构,Job是QuickBuild工程的基本组成单位,一个QucikBuild工程至少含有一个Job,工程中所有的Job是并行结构,各个Job之间不会相互影响。每个Job中默认包含一个toolGroup,用户可以在默认的toolGroup中添加项目所需的工具和工具块。工具块(toolBlock)与工具组(toolGroup)都是工具的**“容器”**,通过使用工具块与工具组可以将完成某一功能的工具进行封装,实现项目模块化,同时亦可将某一特定功能的工具块或工具组导出实现重复使用,类似于编程语言中“函数”功能。工具块中亦可以包含工具块与工具组,两者之间的包含关系没有明确层次关系。
1.2VisionPro脚本简介
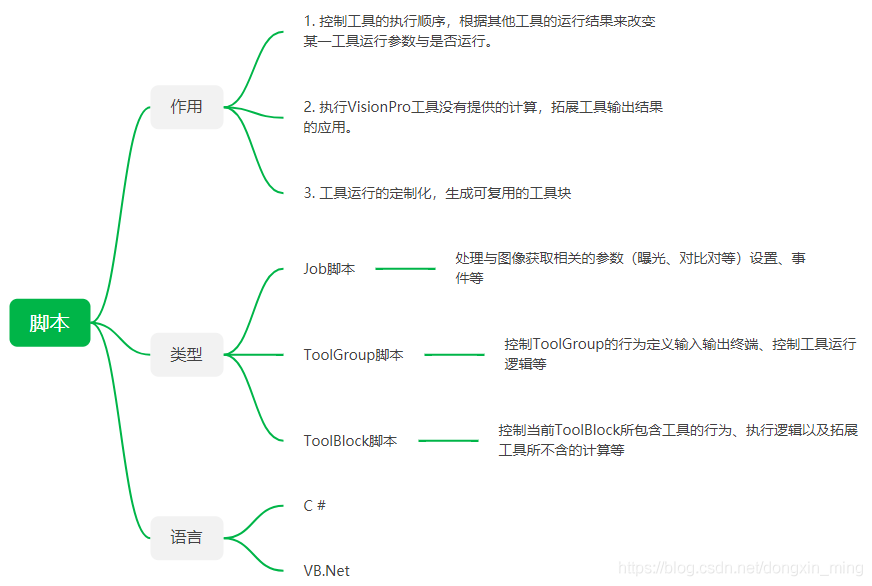
VisionPro工具封装了视觉算法与用户交互界面,toolGroup与toolBlock提供了组合工具的容器,但是并非所有的功能都能通过既定交互界面实现。为了让用户实现客制化功能更加“随心所欲”,实现VisionPro本身无法实现的逻辑功能,VisionPro预留了脚本功能。脚本的类型、作用与支持语言如下图所示:
二、脚本类与方法
VisionPro通过”多态”技术实现脚本功能,VisionPro 的每一Job、toolGroup、toolBlock对象都含有一个接口对象,用户通过重写接口方法实现自定义拓展功能。以toolGroup为例, ICogToolGroupScript接口中定义了子类中必须实现的函数,当toolGruoup执行到某一节点(工具准备运行、工具运行完成等)时会调用相应的接口函数实现用户指定的功能。
如果你对接口、多态理解不够深入,你只需要明白脚本就是**“填空题”**,VisionPro在适当的位置给你留下空白,在这个空白区域你可以在满足条件的情况下“自由发挥”,实现你想要实现的功能。
2.1 toolGroup脚本类
以ToolGroup脚本为例展开,toolGroup 脚本是继承于CogToolGroupBaseScript,实现了ICogToolGroupScript接口,该接口有四个方法,详细介绍如下:
public class CogToolGroupBaseScript : ICogToolGroupScript{ // public virtual bool GroupRun(ref string message,ref Cognex.VisionPro.CogToolResultConstants result) { return true; } public virtual void ModifyCurrentRunRecord(ICogRecord currentRecord) {} public virtual void ModifyLastRunRecord(ICogRecord lastRecord) {} public virtual void Initialize(Cognex.VisionPro.ToolGroup.CogToolGroup host) { toolGroup = host; } protected Cognex.VisionPro.ToolGroup.CogToolGroup toolGroup=null;}
Initialize()顾名思义,该方法用于对toolGroup工具进行初始化,当退出脚本编辑工具时脚本会进行编译并进行初始化,此时该方法会被调用。此外,在对该group通过*.vpp文件进行加载时也会被立即调用。所以,所有的“一次性”的初始化工作都应该写在该方法中。
GroupRun()方法运行该Group中的工具,如果该方法返回值为true,所有的属于当前Group的视觉工具都将运行,如果返回值为false,用户可以自定义工具的执行顺序,返回值为false为常见情况。
ModifyCurrentRunRecord()方法用于修改CurrentRecord,在toolGroup的CurrentRecord被创建后调用。
ModifyLastRunRecord()方法用于修改LastRunRecord,在toolGroup的LastRunRecord被创建后调用,例如:在最终生成图像中添加标签、该表颜色、用不同几何图像标记目标区域。
成员变量toolGroup为CogToolGroup类型,该类的runTool方法用于运行指定视觉工具;Tools 属性为当前Group的工具集合,一般用于获取当前工具组中某一工具的引用;DefineScriptTerminal、GetScriptTerminalData、SetScriptTerminalData 方法用于定义、获取、设置输入输出终端。
//对于当前Group存在的视觉工具的程序集与命名空间会自动添加,如果用户想要使用当前Group不存在的工具或者添加自定义程序集可以手动添加//详细的操作步骤会在后续实例中进行介绍using System;using Cognex.VisionPro;using Cognex.VisionPro3D;using Cognex.VisionPro.ToolGroup; public class UserScript : CogToolGroupBaseScript{ //默认情况下遍历group中所有的工具并运行,用户可以根据实际情况自定义运行逻辑与顺序 public override bool GroupRun(ref string message, ref CogToolResultConstants result) for (Int32 toolIdx = 0; toolIdx < toolGroup.Tools.Count; toolIdx++) toolGroup.RunTool(toolGroup.Tools[toolIdx], ref message, ref result); return false;//默认情况下为false表示用户可以控制工具的运行顺序,返回值为true则运行当前Group中所有工具。 } public override void ModifyCurrentRunRecord(Cognex.VisionPro.ICogRecord currentRecord) { //在此处添加用户代码实现自定义修改CurrentRunRecord的功能 } public override void ModifyLastRunRecord(Cognex.VisionPro.ICogRecord lastRecord) { //在此处添加用户代码用于所有工具运行完成后根据用户需求创建Record或者在既有Record中添加标记等 } public override void Initialize(CogToolGroup host) { //调用父类初始化函数,初始化toolGroup对象 base.Initialize(host); }}
2.2 toolBlcok脚本类
与toolGroup脚本类似,toolBlock的脚本父类CogToolBlockAdvancedScriptBase,该类实现的接口与toolGroup相同,都是ICogToolGroupScript,不同之处在于toolBlock与两个脚本基类,CogToolBlockSimpleScript 与 CogToolBlockAdvancedScript 分别用于“简单脚”与“复杂”脚本,两者之间的区别在于复杂脚本能够实现:①动态定义toolBlock的输入输出终端,② 能够访问当前工具块所包含工具的所有属性与方法,为保证与toolGroup脚本使用的统一性,推荐直接使用复杂脚本。
存在即合理,简单脚本具有使用的便利性,在访问工具块的输入输出终端时,两者的具体访问方式如下:
//使用简单脚本为输出赋值Outputs.Degrees = Inputs.Radians * 180 / Math.PI;//使用复杂脚本为输出赋值this.mToolBlock.Outputs["Degrees"].Value = ((double) this.mToolBlock.Inputs["Radians"].Value) * 180 / Math.PI;
既然与toolGroup实现了相同的接口,toolBlock脚本基类的方法与toolGroup必然相同,功能基本无异,不再赘述。
2.3Job脚本类
Job脚本用于控制与图像获取相关的设备属性与参数,基类为CogJobBaseScript,实现ICogJobScript接口。
public class CogJobBaseScript : ICogJobScript { public virtual void Initialize(CogJob jobParam) { job = jobParam; } public virtual void AcqFifoConstruction(ICogAcqFifo fifo) {} public virtual void PreAcquisition() {} public virtual void PostAcquisition(ICogImage image) {} public virtual bool PostAcquisitionRef(ref ICogImage image) { PostAcquisition(image); return true; } public virtual bool PostAcquisitionRefInfo(ref ICogImage image, ICogAcqInfo info) { return PostAcquisitionRef(ref image); } protected CogJob job = null; }}
Initialize()初始化方法,获取当前job引用以及用户需要的初始化数据。
PreAcquisition()在FIFO的StartAcquire()方法调用之前被调用,即在进行图像采集之前调用,如在图像采集之前设置曝光、增益、对比度等图像参数。
PostAcquisition()在图像采集完成之后被调用。
PostAcquisitionRef()该方法与 PostAcquisition 类似,不同之处在于 image 是以引用的方式传递,如果这个方法返回 Ture , VisionPro 将处理这个 image,如果这个方法返回 False ,这个 image 将不会被立即进行处理 ,而是采集下一幅图像,这可以使你能够在处理所取的多个 image 之前将它们联合在一起.(如果 PostAcquisition 和 PostAcquisitionRef 都被重写,PostAcquisition 将被忽略)。例如你需要同一个相机采集多张不同曝光的图像进行合成,并不是每次采集后都立即进行处理,而是采集到固定数量或者满足某一条件时进行处理。
PostAcquisitionRefInfo()与PostAcquisiitonRef相似,多了一个参数,用户可以通过ICogAcqInfo获取图像的时间戳,重写该方法后 PostAcquisition 、PostAcquisitionRef、 PostAcquisitionRef会被忽略。
三、脚本使用案例
3.1 job本实用实例-----自动调节曝光时间
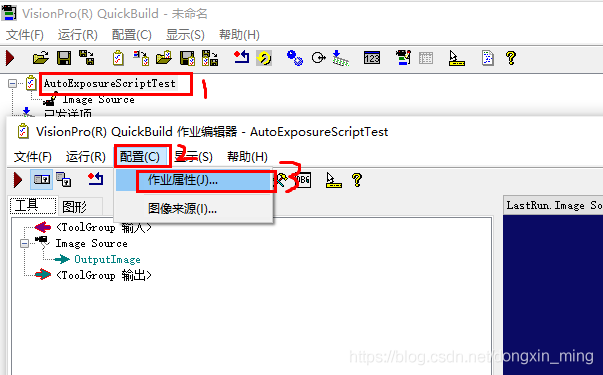
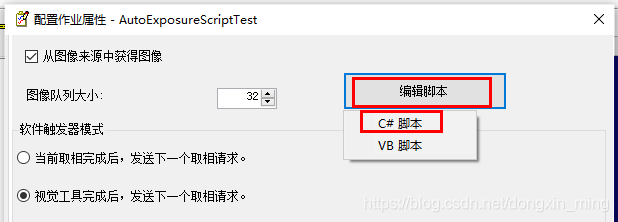
setp1.新建Job,双击进入job中。

step2配置->作业属性->编辑脚本->C#脚本,进入Job脚本编辑环境
using System;using Cognex.VisionPro;using Cognex.VisionPro.QuickBuild;using Cognex.VisionPro.ImageProcessing; public class UserScript : CogJobBaseScript{ double exposure = 10;#region "When an Acq Fifo Has Been Constructed and Assigned To The Job" // This function is called when a new fifo is assigned to the job. This usually // occurs when the "Initialize Acquisition" button is pressed on the image source // control. This function is where you would perform custom setup associated // with the fifo. public override void AcqFifoConstruction(Cognex.VisionPro.ICogAcqFifo fifo) { }#endregion #region "When an Acquisition is About To Be Started" // Called before an acquisition is started for manual and semi-automatic trigger // models. If "Number of Software Acquisitions Pre-queued" is set to 1 in the // job configuration, then no acquisitions should be in progress when this // function is called. public override void PreAcquisition() { // To let the execution stop in this script when a debugger is attached, uncomment the following lines. // #if DEBUG // if (System.Diagnostics.Debugger.IsAttached) System.Diagnostics.Debugger.Break(); // #endif ICogAcqExposure IExposure = job.AcqFifo.OwnedExposureParams; IExposure.Exposure = exposure; }#endregion #region "When an Acquisition Has Just Completed" // Called immediately after an acquisition has completed. // Return true if the image should be inspected. // Return false to skip the inspection and acquire another image. public override bool PostAcquisitionRefInfo(ref Cognex.VisionPro.ICogImage image, Cognex.VisionPro.ICogAcqInfo info) { // To let the execution stop in this script when a debugger is attached, uncomment the following lines. // #if DEBUG // if (System.Diagnostics.Debugger.IsAttached) System.Diagnostics.Debugger.Break(); // #endif CogHistogram curImageHist = new CogHistogram(); CogHistogramResult curHistResult = curImageHist.Execute(image,null); if(curHistResult.Mean>150) exposure *= 0.75; if(curHistResult.Mean < 50) exposure *= 1.5; if(exposure<0.1) exposure = 0.1; return true; }#endregion //Perform any initialization required by your script here. public override void Initialize(CogJob jobParam) { //DO NOT REMOVE - Call the base class implementation first - DO NOT REMOVE base.Initialize(jobParam); }#endregion }
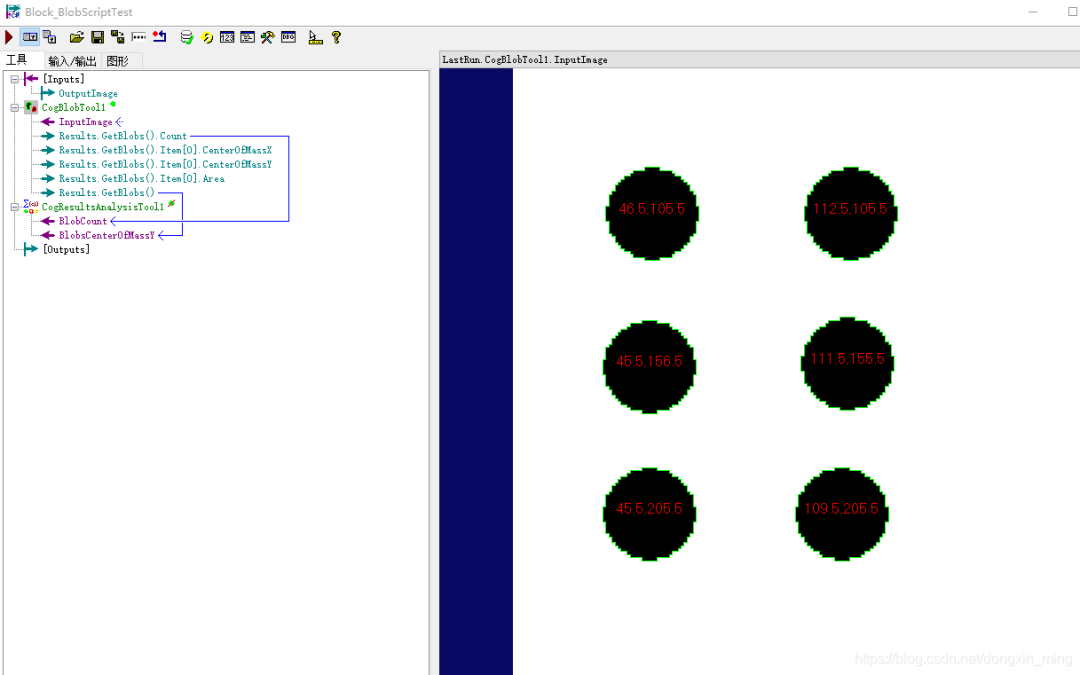
3.2 toolBlock脚本使用实例-----显示Blob区域的中心坐标于当前Blob区域
toolBlock脚本的应用最为广泛,用于控制工具的运行逻辑,修改生成的record,拓展数据逻辑等。本例以最简单的方式介绍toolBloc脚本使用方法,本例的具体应用为在各个独立的Blob区域显示其中心坐标值。
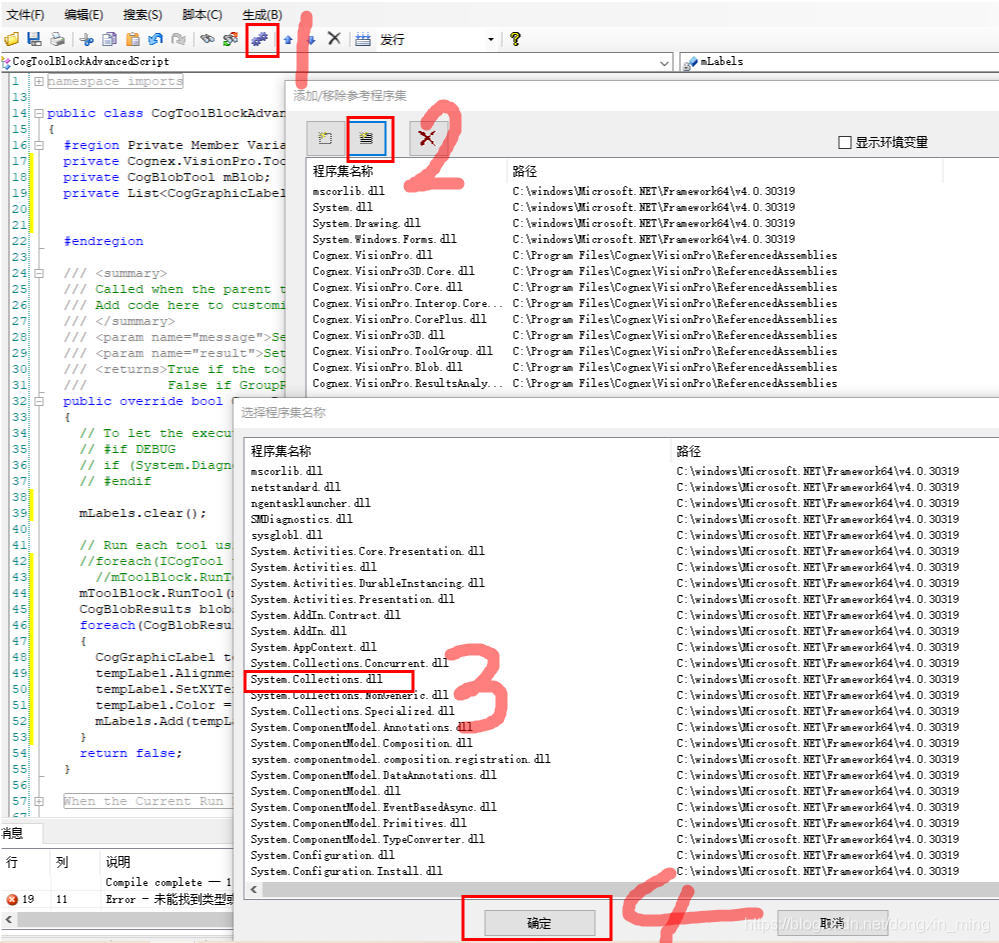
在进行脚本编辑之前,根据用户需要添加程序集以及命名空间,添加引用程序集的具体过程如下图所示:
在编写C#toolBlock脚本时,其常规流程为:
step1.根据需求添加程序集以及命名空间
step2.声明对应toolBlock的相关变量以及用户自定义变量
step3.在Initialize()函数中获取toolBlock中工具的引用
step4.在GroupRun()方法中通过工具变量控制工具的执行顺序以及获取所需用户数据
step5.修改Record得到用户所需效果
//==========================step1===================================#region namespace importsusing System;using System.Collections;using System.Collections.Generic;using System.Drawing;using System.IO;using System.Windows.Forms;using Cognex.VisionPro;using Cognex.VisionPro.ToolBlock;using Cognex.VisionPro3D;using Cognex.VisionPro.Blob;using Cognex.VisionPro.ResultsAnalysis;#endregion public class CogToolBlockAdvancedScript : CogToolBlockAdvancedScriptBase{//==========================step2=================================== #region Private Member Variables private Cognex.VisionPro.ToolBlock.CogToolBlock mToolBlock; private CogBlobTool mBlob; private List
效果图为:
四、脚本进阶
4.1脚本是“插件”程序集
无论你是通过Job脚本、ToolGroup脚本还是ToolBlock脚本拓展QuickBuild程序功能时,实际上是完善了继承于某一接口的脚本类(继承于CogToolGroupBaseScript、CogJobBaseScript或者CogToolBlockAdvancedScriptBase类),在退出脚本编辑环境时QuickBuild对你完善的子类进行编译,如果出现语法错误会报错提示,在语法错误改正前当前脚本的所有内容都不会被调用,因为没有通过编译。如果出现逻辑错误不会提示,需要在VS环境下进行调试,调试方法后续会详细介绍。QuickBuild程序运行时通过接口实现对脚本子类成员函数的调用,从而将脚本函数的拓展功能进行实现。
关于脚本,你还需要明白以下几点:
用户在脚本中编写的代码会成为VisionPro程序的一部分,其中的bug也不可避免影响到VisionPro 的运行。
用户实现的脚本类会被编译为程序集加载到内存当中,而且每次对脚本进行编辑之后会重新编译,但是旧版本的程序集会一致在内存中直到你重新启动QuickBuild,因此频繁修改脚本会增加一点点的内存消耗。
脚本程序集被加载到内存之后,VisionPro会创建一个该脚本类的接口对象。脚本重新编辑之后接口对象会释放Dispose之前对象,运行GC进行垃圾回收,创建新脚本类的接口实例。
在进行脚本编辑时,如果脚本内容比较多,最好经常进行保存,保存时需要退出脚本编辑环境对整个QuickBuild工程进保存。补充一点,在QuickBuild环境下进行工具编辑时亦需要进行随手保存,工具Block误删除之后好像是无法恢复的只有退出QuickBuild时选择不保存,前提是你误删除之前刚好保存过,惨痛的经历已不止一次。
4.2脚本实现事件与委托
事件响应函数中要增加异常处理机制(Try …Catch),否则容易导致VisionPro运行出现异常;
不要在事件处理函数中产生当前的事件,否则会造成无限循环;
重写实现Dispose(),取消事件注册。脚本每次修改退出后都会进行编译,运行时重新注册事件,如果没有在Dispose总取消注册会造成多次注册;
当前事件的响应函数可能不止你在脚本中实现,在VisionPro内部机制中可能也有实现,这些事件的响应函数执行顺序是不确定的。
-
编程语言
+关注
关注
10文章
1942浏览量
34668 -
VisionPro
+关注
关注
6文章
19浏览量
15644 -
脚本
+关注
关注
1文章
389浏览量
14853
原文标题:VisionPro之脚本(一文读懂VisionPro脚本原理与使用方法)
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STM32项目分享:智能台灯系统

【毕设项目参考】物联网10+项目推荐,附项目文档/源码/视频

STM32项目分享:智能门禁锁系统
STM32项目分享:智能大棚/智慧农业系统
STM32项目分享:智慧农业(机智云)系统
![RA6T2的16位模数转换器操作 [12] 应用<b class='flag-5'>项目</b><b class='flag-5'>简介</b>](https://file1.elecfans.com/web2/M00/BB/1B/wKgZomWXtb6ACk_NAAARMuEl9ZA261.png)
Vision Pro没起飞,下个故事是AI:苹果变成了一家卖梦的公司

苹果VisionPro头显无法通过“查找”确定位置
苹果VisionPro头显开售后遭遇多项重大缺陷:不能定位、远程发声
寿宁县五校迁建项目企业微电网能效管理系统项目的设计与应用

基于光谱共焦技术的VR/AR眼镜镜片厚度检测





 工商网监
工商网监
评论