 利用多次回波技术的激光雷达实现雨雾穿透进行车辆测量
利用多次回波技术的激光雷达实现雨雾穿透进行车辆测量
智能驾驶或无人驾驶车辆必然是车辆智能化的发展趋势,目前全国各地多个城市都有相关智能车辆测试甚至落地运营的新闻。目前智能(无人)驾驶车辆多采用了一个或者多个激光雷达作为主要的障碍物检测为智能驾驶提供环境的感知结果。
然而由于激光雷达的固有特性导致激光雷达在雨雾、灰尘环境中不要用,会将雨雾、灰尘识别成障碍物。有过无人驾驶开发经验的工程师可能会体会比较深。这个问题的根本原因是几个雷达的光束打到雨雾、灰尘上会出现反射现象,激光雷达接收到反射的激光,则判断雨雾、灰尘为障碍物,造成误识别。雨雾、灰尘造成的误识别已经成为激光雷达应用中的难点。
针对此种情况,多次回波技术可以对激光雷达的数据进行修正,在雨雾等恶劣天气下也能保持较稳定的探测性能。

多次回波指的是激光雷达发射的光束打到一些物体上会发生反射和透射,透射的光再遇到物体还会发生反射,这样激光雷达发射一束光就不只接收到一次反射光,而是接收到多次反射光,采用相应的算法对多次发射光进行处理,就是多次回波技术。
多次回波技术,在很多激光雷达中都有应用。最常见的处理方法就是采用最后一次回波,如果在雨雾、灰尘环境中,激光可以穿透雨雾、灰尘,并最终打到障碍物上,并反射,采用最后一次回波就可以把雨雾、灰尘滤除掉。当然多次回波的作用是有限的如果雨雾、灰尘很大,激光完全穿透不了,依然会造成误识别。例如:
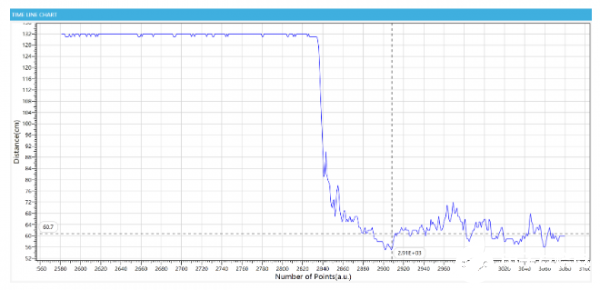
假设雨雾和被测车辆之间的距离为L,雨雾回波信号Echo1的脉宽为Δt,只有当雨雾与被测车辆之前的间距S>V光速×Δt/2时,雨雾和车辆的回波信号Echo1和Echo2才能被区分开,雷达能测到两个目标,通过算法处理,得到被测车辆的准确距离。另外距离越近,雨雾的回波信号Echo1越强,因此一般雨雾只会形成一次可以探测到的回波信号,并非雨雾环境下全程都有回波信号。如下图:搭建简易测试场景对多次回波技术的效果进行验证,实验中使用三角架支撑TF03激光雷达,在降雨量较大时对应开启/关闭多次回波测量结果
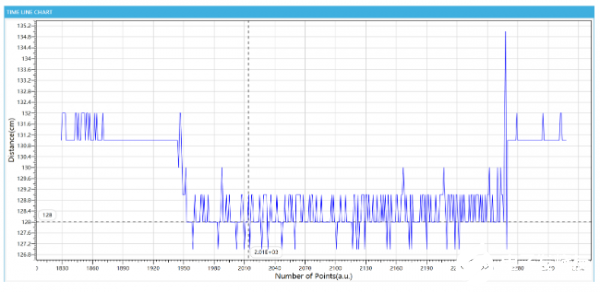
无多次回波测试效果:根据测试结果,开启多次回波后,测量误差显著减小,LiDAR可穿透一定程度水雾。同理,根据多次回波技术获取到的数据,结合特定的滤波算法,激光雷达同样可实现一定程度的雨雪雾霾尘穿透。
现实生活中,绝大多数常规场景下,主要产生的为二次回波,三、四回波的情况相对较少,五次及以上的回波出现的概率近乎为零。在一些特殊场景中,如森林地区、庄稼地、草原等,多次回波出现的频率会大大增加。综合来看,激光雷达中使用的多为二次回波技术来实现雨雾穿透。
截至目前,结合雨雾算法(多次回波探测技术)的提供的激光雷达 长距离传感器 - TF03-180是一款工业级高速测量的激光雷达,且量程可达最高180m。针对室外强光和雨雪雾环境①的补偿算法,使其在强光和雨雪雾环境下依然可以正常工作。已成功在交通行业落地,可检测国内某交通流量项目、高速车速检测等项目。
责任编辑:gt
-
传感器
+关注
关注
2551文章
51107浏览量
753681 -
测量
+关注
关注
10文章
4859浏览量
111326 -
激光雷达
+关注
关注
968文章
3972浏览量
189937
发布评论请先 登录
相关推荐
如何提升激光雷达数据的精度
激光雷达技术的发展趋势
激光雷达在自动驾驶中的应用
LIDAR激光雷达逆向建模能用到revit当中吗
光学雷达和激光雷达的区别是什么
激光雷达在雨雾天表现如何

激光雷达芯片技术发展 激光雷达在无人驾驶中的应用

激光雷达测量误差的成因分析
激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论