 树莓派4的hello world程序分析
树莓派4的hello world程序分析

树莓派4裸机基础教程:从hello world开始
1.前言
2.项目工程介绍
2.1 Makefile
2.2 link.ld 链接文件
3.从CPU的角度看代码的运行
3.1 start.S文件
3.2 main函数的功能
4.树莓派4串口外设程序
4.1 设置gpio的功能
4.2 配置串口控制器
5.总结
1.前言
当我们去研究一个系统的时候,首先需要从最简单的程序开始入手。前面文章的介绍已经描述了项目的环境搭建以及启动过程。
树莓派4裸机基础教程:环境搭建
树莓派4裸机基础教程:芯片启动到代码执行
本文主要从最简单的裸机代码开始分析,让板子的串口可以输出hello world信息。这篇文章会介绍工程的构建,程序的运行等等一些列的流程,以及树莓派4最后如何输出hello world。在嵌入式开发的过程中,往往都是万事开头难,只有看到了程序正在运行的那一刻,后面的工作也就迎刃而解了。
2.项目工程介绍
最后的工程文件如下所示:

2.1 Makefile
我们通过Makefile进行相关工程的构建,使用make生成kernel可执行程序文件。对于这种简单的工程,使用Makefile进行工程的构建是很简单的,对于复杂的工程,可以使用scons或者cmake等更加高级的工具,进行工程的构建。
首先来看一下Makefile中的内容:
SRCS=$(wildcard*.c) OBJS=$(SRCS:.c=.o) CFLAGS=-march=armv8-a-mtune=cortex-a72-Wall-O2-ffreestanding-nostdinc-nostdlib-nostartfiles all:cleankernel7.img start.o:start.S arm-none-eabi-gcc$(CFLAGS)-cstart.S-ostart.o %.o:%.c arm-none-eabi-gcc$(CFLAGS)-c$< -o $@ kernel7.img: start.o $(OBJS) arm-none-eabi-ld -nostdlib -nostartfiles start.o $(OBJS) -T link.ld -o kernel7.elf arm-none-eabi-objcopy -O binary kernel7.elf kernel7.img clean: rm kernel7.elf kernel7.img *.o >/dev/null2>/dev/null||true
分析一下这个文件的细节:
SRCS=$(wildcard*.c)
其中使用wildcard这个函数来获取当前文件夹中所有的.c文件的列表放在SRCS目录中。
OBJS=$(SRCS:.c=.o)
该句表示环境变量的替换,就是将SRCS列表中的所有的.c文件名替换成.o文件名。
all:cleankernel7.img
当使用make或者make all的时候,会执行clean与kernel7.img对应的命令的指令。
start.o:start.S arm-none-eabi-gcc$(CFLAGS)-cstart.S-ostart.o
根据makefile的语法规则这个解释应该是
目标:源 指令
由于前面的定义只定义了C语言的代码,所以这里也需要将汇编语言的编译加进去。
%.o:%.c arm-none-eabi-gcc$(CFLAGS)-c$< -o $@
其中$<表示第一个依赖文件的名词,$@表示目标文件的名词。
kernel7.img:start.o$(OBJS) arm-none-eabi-ld-nostdlib-nostartfilesstart.o$(OBJS)-Tlink.ld-okernel7.elf arm-none-eabi-objcopy-Obinarykernel7.elfkernel7.img
通过arm-none-eabi-ld链接所以的.o文件。arm-none-eabi-objcopy用于生成在arm平台上运行的可执行程序,另外的作用就是去掉一些符号信息。
clean: rmkernel7.elfkernel7.img*.o>/dev/null2>/dev/null||true
用于清理编译过程中的中间文件。
2.2 link.ld 链接文件
由于程序的编译之后,需要进行链接,link文件告诉了程序链接的规则。下面看一下链接文件的内容:
SECTIONS { /* * First and formost we need the .init section, containing the code to * be run first. We allow room for the ATAGs and stack and conform to * the bootloader's expectation by putting this code at 0x8000. */ . = 0x8000; .text : { KEEP(*(.text.boot)) *(.text .text.* .gnu.linkonce.t*) } /* * Next we put the data. */ .data : { *(.data) } .bss : { . = ALIGN(16); __bss_start = .; *(.bss*) *(COMMON*) __bss_end = .; } } __bss_size = (__bss_end - __bss_start) >> 3;
程序分为代码段(.text),数据段(.data)以及bss段(.bss)。首先将代码段的地址. = 0x8000;指向0x8000的地址处,因为默认情况下,树莓派默认启动后,会从0x8000这个地址处开始加载程序并启动。KEEP(*(.text.boot))表示首先将.text.boot的内容放在第一个地址处,目前开始的地址是0x8000。需要注意的是.bss段包含的是初始化为零的数据,通过将这些数据放在一个单独的节中,编译器可以在elf文件中省略一些空间。所以需要记录bss_start与bss_end段。并且将这段空间对齐。如果不对齐,一些函数访问的时候,将会出现异常数据。
3.从CPU的角度看代码的运行
要想真正的理解CPU的执行代码的流程,必须将自己的当作CPU去执行代码的逻辑。
3.1 start.S文件
在start.S文件中,设置了CPU的一些状态,为后续的程序执行准备了环境。
.equMode_USR,0x10 .equMode_FIQ,0x11 .equMode_IRQ,0x12 .equMode_SVC,0x13 .equMode_ABT,0x17 .equMode_UND,0x1B .equMode_SYS,0x1F .section".text.boot" /*entry*/ .globl_start _start: /*CheckforHYPmode*/ mrsr0,cpsr_all andr0,r0,#0x1F movr8,#0x1A cmpr0,r8 beqoverHyped bcontinue overHyped:/*GetoutofHYPmode*/ adrr1,continue msrELR_hyp,r1 mrsr1,cpsr_all andr1,r1,#0x1f;@CPSR_MODE_MASK orrr1,r1,#0x13;@CPSR_MODE_SUPERVISOR msrSPSR_hyp,r1 eret continue: /*Suspendtheothercpucores*/ mrcp15,0,r0,c0,c0,5 andsr0,#3 bne_halt /*setthecputoSVC32modeanddisableinterrupt*/ cps#Mode_SVC /*disablethedataalignmentcheck*/ mrcp15,0,r1,c1,c0,0 bicr1,#(1<<1) mcr p15, 0, r1, c1, c0, 0 /* set stack before our code */ ldr sp, =_start /* clear .bss */ mov r0,#0 /* get a zero */ ldr r1,=__bss_start /* bss start */ ldr r2,=__bss_end /* bss end */ bss_loop: cmp r1,r2 /* check if data to clear */ strlo r0,[r1],#4 /* clear 4 bytes */ blo bss_loop /* loop until done */ /* jump to C code, should not return */ ldr pc, _main b _halt _main: .word main _halt: wfe b _halt
分别来看一下这些代码具体的细节。
.section".text.boot"
表示该段标志为.text.boot,这里表示该文件夹会在链接脚本中链接到开头的地址中。然后将_start指定到0x8000的地址处。
/*entry*/ .globl_start _start: /*CheckforHYPmode*/ mrsr0,cpsr_all andr0,r0,#0x1F movr8,#0x1A cmpr0,r8 beqoverHyped bcontinue overHyped:/*GetoutofHYPmode*/ adrr1,continue msrELR_hyp,r1 mrsr1,cpsr_all andr1,r1,#0x1f;@CPSR_MODE_MASK orrr1,r1,#0x13;@CPSR_MODE_SUPERVISOR msrSPSR_hyp,r1 eret
从树莓派启动第一行代码的时候,此时是处于虚拟化模式的,从cpsr_all寄存器中可以读到当前的状态。此时需要退出虚拟化模式。使其运行在Supervisor模式。用eret指令将模式进行切换。
/* Suspend the other cpu cores */ mrc p15, 0, r0, c0, c0, 5 ands r0, #3 bne _halt
因为刚开始的时候,树莓派4是支持4核的,由于当前并不需要这么多核的功能,所以可以让其他的核进入low-power standby低功耗模式WFE(Wait for event)。
/* set the cpu to SVC32 mode and disable interrupt */ cps #Mode_SVC /* disable the data alignment check */ mrc p15, 0, r1, c1, c0, 0 bic r1, #(1<<1) mcr p15, 0, r1, c1, c0, 0
接着关闭中断、关闭非对齐检查。为后续的代码运行准备环境。
/* set stack before our code */ ldr sp, =_start
接着设置sp的栈指针,ldr sp, =_start表示将栈指针设置到_start段的地址这里,由于布局的时候,将_start的代码段的地址设置为0x8000,又因为arm上sp栈指针是向低地址方向增长,sp指向的是栈顶。所以我们可以认为0x8000地址之前的空间都是未被使用的,可以作为C语言执行的栈空间使用。
/* clear .bss */ mov r0,#0 /* get a zero */ ldr r1,=__bss_start /* bss start */ ldr r2,=__bss_end /* bss end */ bss_loop: cmp r1,r2 /* check if data to clear */ strlo r0,[r1],#4 /* clear 4 bytes */ blo bss_loop /* loop until done */
接着清空BSS段,BSS段通常是指用来存放程序中未初始化的或者初始化为0的全局变量和静态变量的一块内存区域。特点是可读写的,在程序执行之前BSS段会自动清0。
/* jump to C code, should not return */ ldr pc, _main
然后设置PC指针。使用ldr pc, _main指令,将_main函数的指针,指向pc。这样下次再执行PC程序的时候就直接执行main函数了。
3.2 main函数的功能
在前面的汇编代码中,为C语言代码执行提供了环境,包括关闭非对齐检查、设置了栈SP的地址、清零了BSS段。这些都是为C代码的执行做准备。在C语言中做了具体的业务。由于目前的裸机代码比较的简单,所以业务也比较容易。
#include"uart.h" voidmain() { //setupserialconsole uart_init(); //sayhello uart_puts("HelloWorld! "); //echoeverythingback while(1){ uart_send(uart_getc()); } }
这个代码就是通过串口输出一个hello world!,然后在while中不断的读串口的输入。那么重点还是放在树莓派串口的初始化上。
4.树莓派4串口外设程序
在做嵌入式的时候,我们总是希望设备与自己是有交互的,比如点亮一个led,或者用串口输出一段字符等等。这都表示程序正常运行。所以会写简单的交互程序也非常的重要。一般比较简单的就是led的呼吸灯。这里用串口,可以做人机交互的信息可以更加的丰富。下面我们来分析一下串口的程序的实现。
在写外设的驱动程序之前,首先需要查看芯片的Peripherals manual。这里查看rpi_DATA_2711_1p0.pdf即可。根据外设空间分布的地址,可以查看如下:
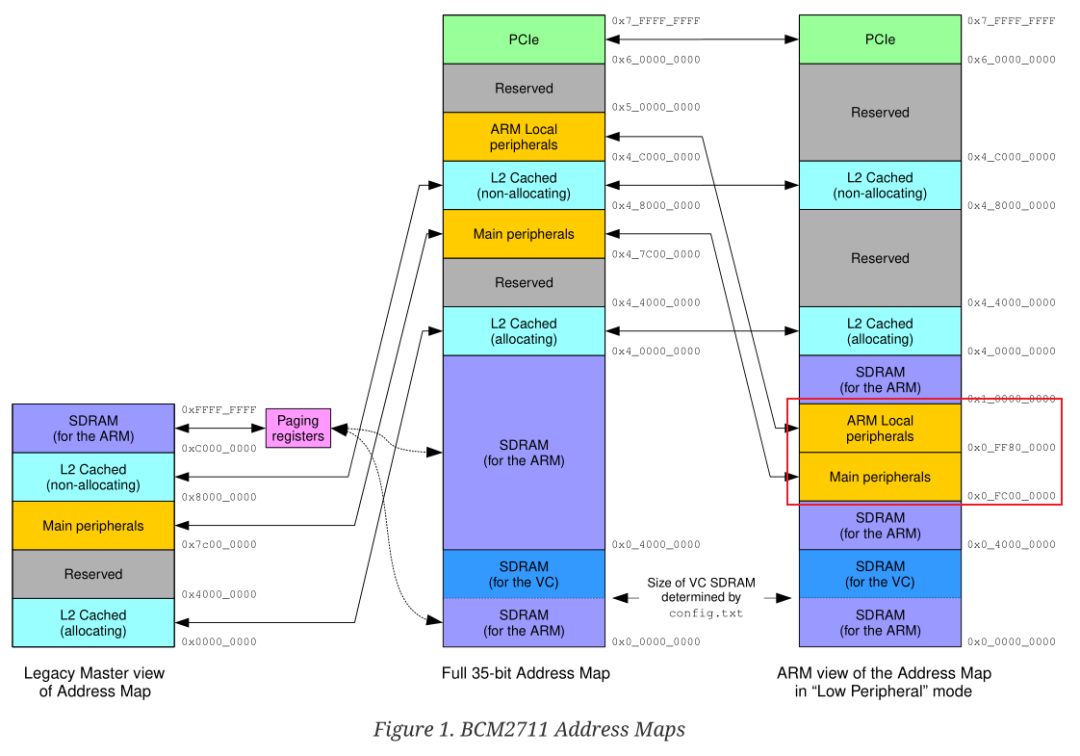
这里由于使用32位的地址空间,根据数据手册,得到芯片的外设的地址的起始地址为0xFE000000。
如果要使用串口,必须要有两个先决条件:
1.相关的gpio配置成串口复用功能
2.配置串口控制器参数
4.1 设置gpio的功能
对于树莓派的gpio,找到对应的地址后,还需要找到其对应的功能。
首先查看树莓派上对应的硬件引脚:
对应的功能如下所示:目前串口使用的硬件引脚为14号与15号引脚。
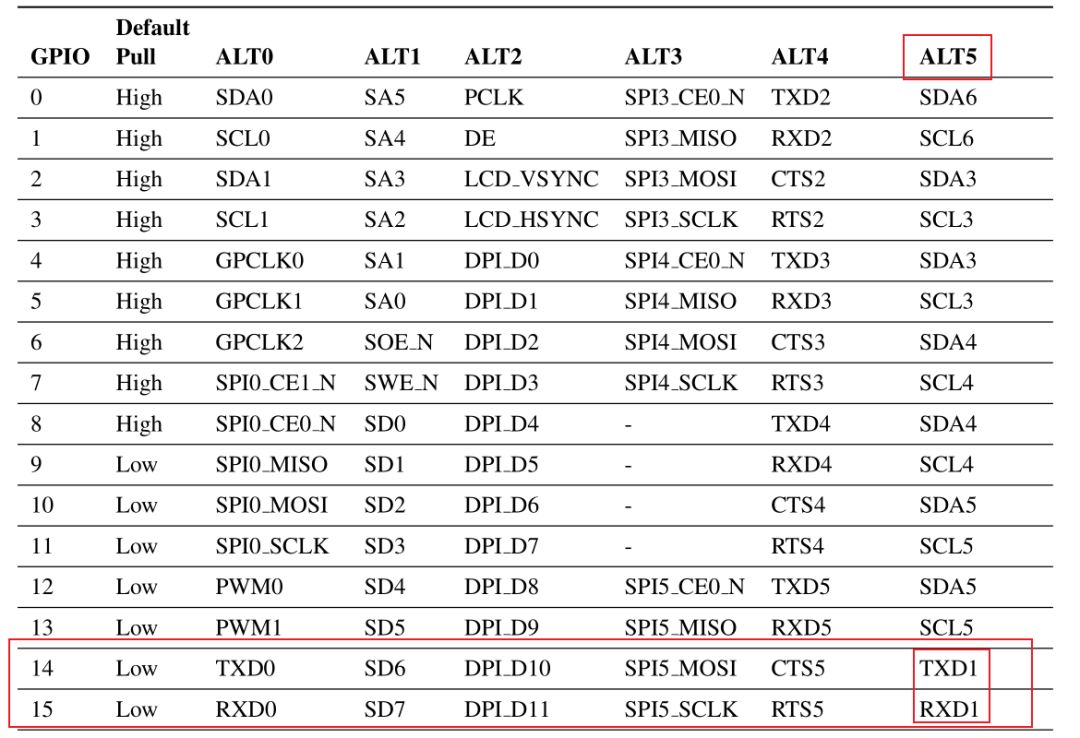
需要设置的复用功能为ALT5。
有了这些信息之后,就可以配置GPFSEL1的功能了。
/** *gpio14RXgpio15TX */ voiduart_gpio_init() { registerunsignedintr; /*mapUART1toGPIOpins*/ r=*GPFSEL1; r&=~((7<<12)|(7<<15)); // gpio14, gpio15 r|=(2<<12)|(2<<15); // alt5 *GPFSEL1 = r; *GPPUD = 0; // enable pins 14 and 15 r=150; while(r--) { asm volatile("nop"); } *GPPUDCLK0 = (1<<14)|(1<<15); r=150; while(r--) { asm volatile("nop"); } *GPPUDCLK0 = 0; // flush GPIO setup *AUX_MU_CNTL = 3; // enable Tx, Rx }
在树莓派中,首先需要选择使能哪些引脚,然后配置成什么模式。对着手册查看,就知道设置这些寄存器位的具体含义了。
4.2 配置串口控制器
串口控制器是需要配置的,目前使用的是AUX的串口控制器,也就是使用的mini UART。所以需要配置串口的一些参数信息。比如串口的波特率、位宽、停止位等等。
*/ voiduart_init() { /*initializeUART1*/ *AUX_ENABLE|=1;//enableUART1,AUXminiuart *AUX_MU_CNTL=0; *AUX_MU_LCR=3;//8bits *AUX_MU_MCR=0; *AUX_MU_IER=0; *AUX_MU_IIR=0xc6;//disableinterrupts *AUX_MU_BAUD=270;//115200baud uart_gpio_init(); }
目前串口不需要使用中断,所以收发数据都直接从串口的fifo中进行获取。
发送数据
/** *Sendacharacter */ voiduart_send(unsignedintc){ /*waituntilwecansend*/ do{asmvolatile("nop");}while(!(*AUX_MU_LSR&0x20)); /*writethecharactertothebuffer*/ *AUX_MU_IO=c; }
判断当前fifo是否有数据,如果没有就发送到串口的fifo。
charuart_getc(){ charr; /*waituntilsomethingisinthebuffer*/ do{asmvolatile("nop");}while(!(*AUX_MU_LSR&0x01)); /*readitandreturn*/ r=(char)(*AUX_MU_IO); /*convertcarrigereturntonewline*/ returnr==' '?' ':r; }
从串口的fifo中读取字符。
5.总结
从树莓派4的hello world程序分析,详细的描述了串口的输出信息到控制台的过程。前期的c语言运行环境的准备阶段是很多同等系列的芯片都需要去做的事情,后面外设的初始化可能会和具体的硬件平台相关。但是从整体上来看,整个流程还是比较通用的。在不同的芯片与不同的架构上,都需要去做这些基本操作。
本文从最小系统的角度描述了系统启动过程,配置寄存器参数需要对着手册查看,这里也不进行过多的分析,总之多看手册才是学会使用一款芯片的必经之路,只有反复的看,反复的思考理解,才能使用得当。欧阳修《卖油翁》 里说到:无他,但手熟尔。
原文标题:树莓派4裸机基础教程:从hello world开始
文章出处:【微信公众号:嵌入式IoT】欢迎添加关注!文章转载请注明出处。
-
树莓派
+关注
关注
122文章
2086浏览量
110880
原文标题:树莓派4裸机基础教程:从hello world开始
文章出处:【微信号:Embeded_IoT,微信公众号:嵌入式IoT】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
零成本钢铁侠手套!树莓派+OpenCV 秒变手势遥控器!

如何使用树莓派与OpenCV实现面部和运动追踪的云台系统?
如何使用树莓派+OpenCV实现姿态估计和面部特征点追踪?
树莓派屏幕怎么选?
工业树莓派的高光时刻!树莓派工业级 HMI 列阵!

树莓派6 传闻:发布日期与规格!
20个任何人都能完成的树莓派酷炫项目!
树莓派小技巧:无需键盘或显示器,如何通过WiFi设置树莓派?
关于 树莓派5 超频:你需要知道的一切!
用树莓派“揪出”家里的耗电怪兽!
树莓派“吉尼斯世界记录”:将树莓派的性能发挥到极致的项目!
树莓派5 与 树莓派4:深度对比与独特优势!



评论